rk camera驱动调试学习
700 Words|Read in about 4 Min|本文总阅读量次
rk camera驱动调试学习学习。
1驱动调试准备工作
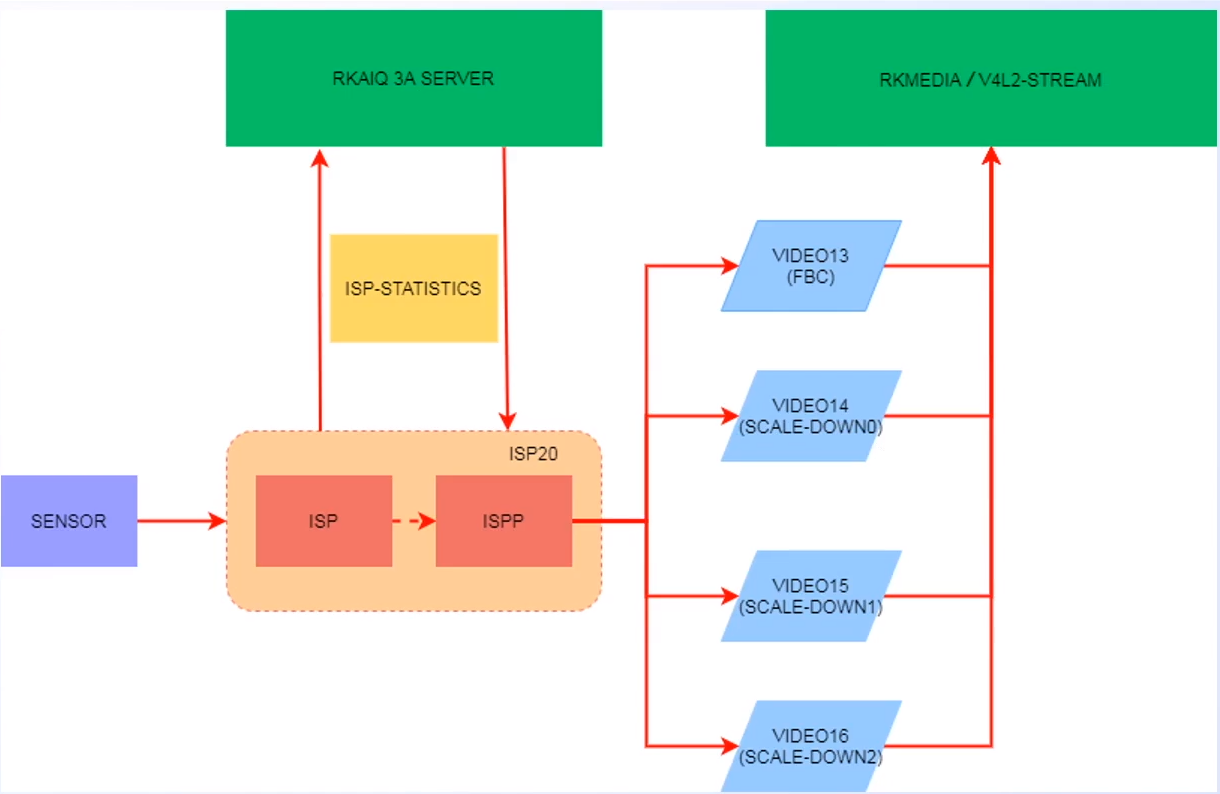
需要对ISP2.0的数据流流程图有大致的了解。
ISP从sensor端获取数据流之后,通过3A处理,最后由ISPP输出四路数据流给到用户。
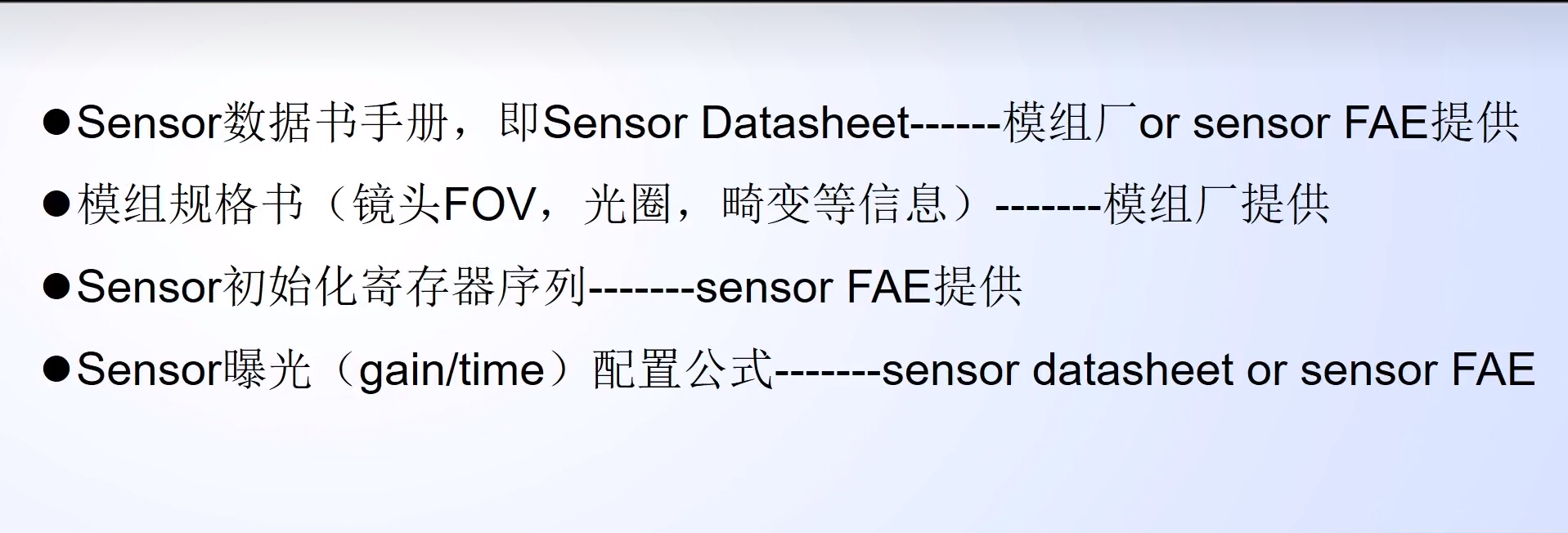
另外,调试驱动之前需要准备以下资料
2驱动数据结构类型简要介绍
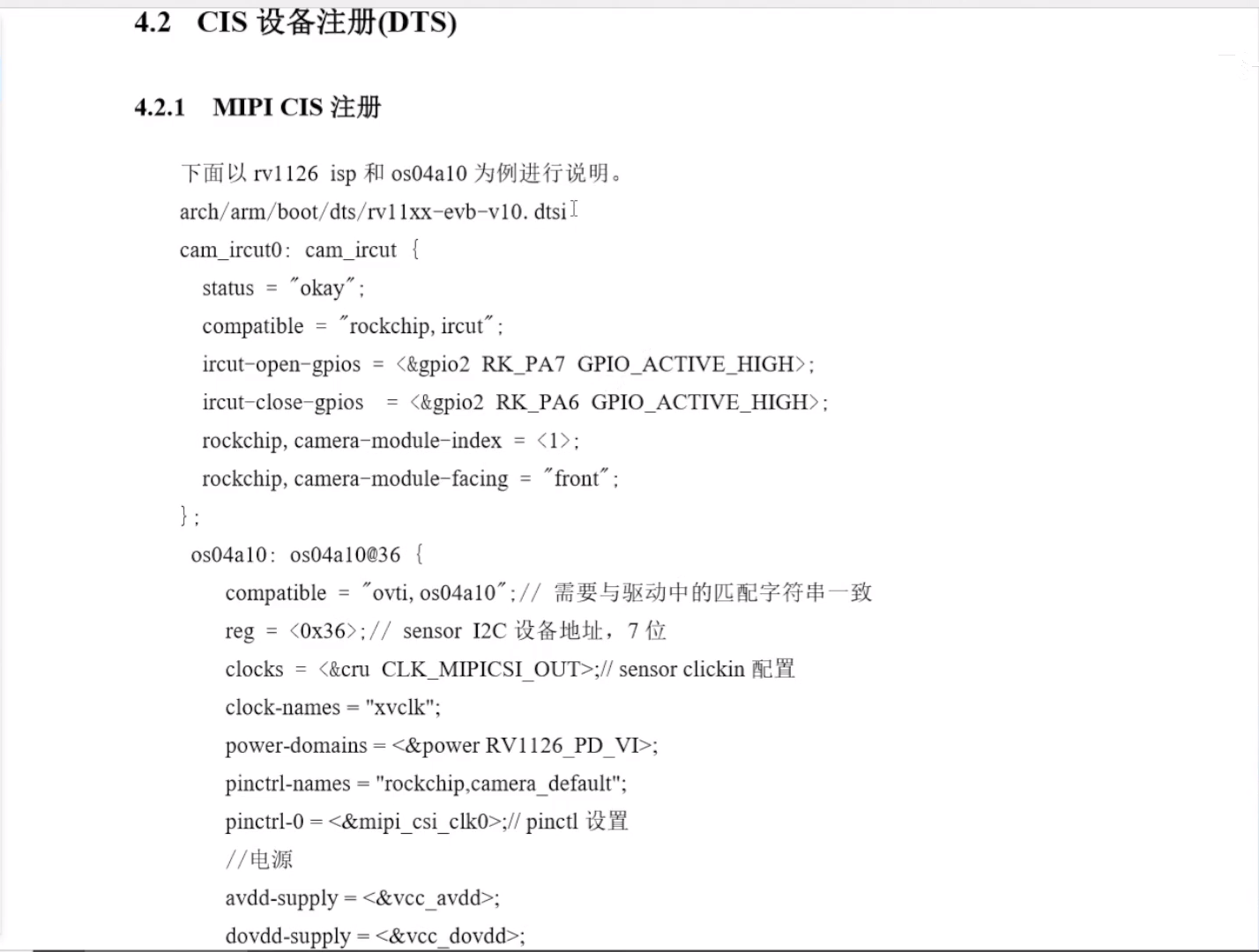
2.1CIS设备注册(DTS)
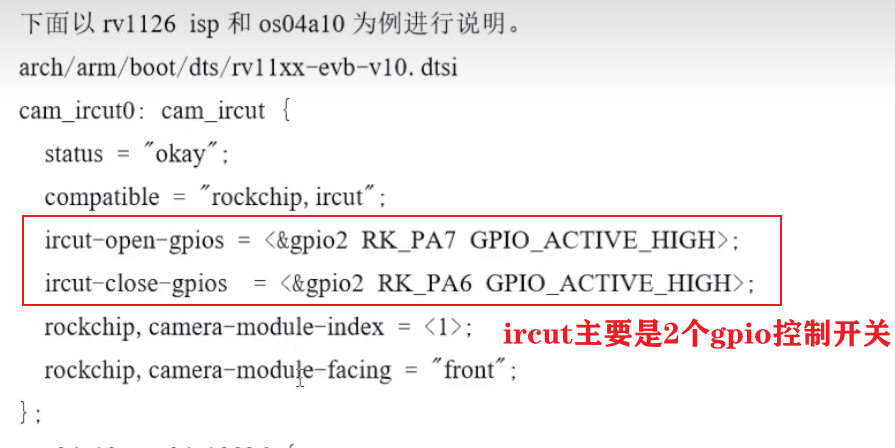
以rv1126 isp和os04a10举例说明,开始为ircut(红外滤光片切换器 ),如果没有这个可以不加
2.1.1ircut(红外滤光片切换器 )注册
2.1.2sensor注册
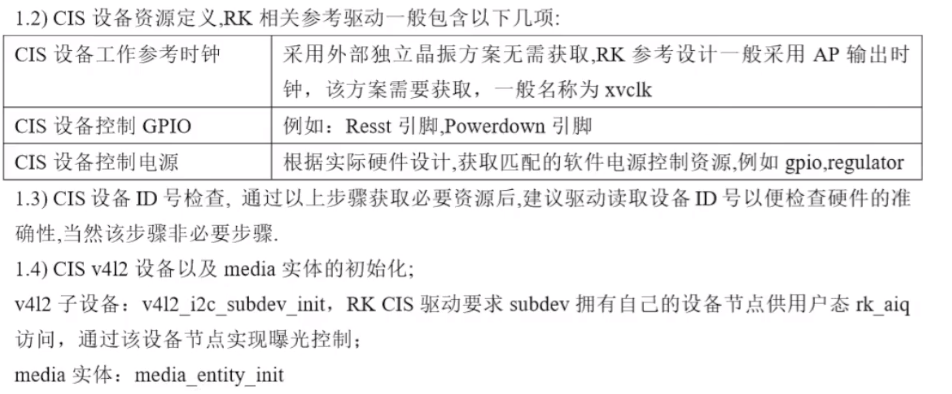
sensor相关配置,主频配置电源配置
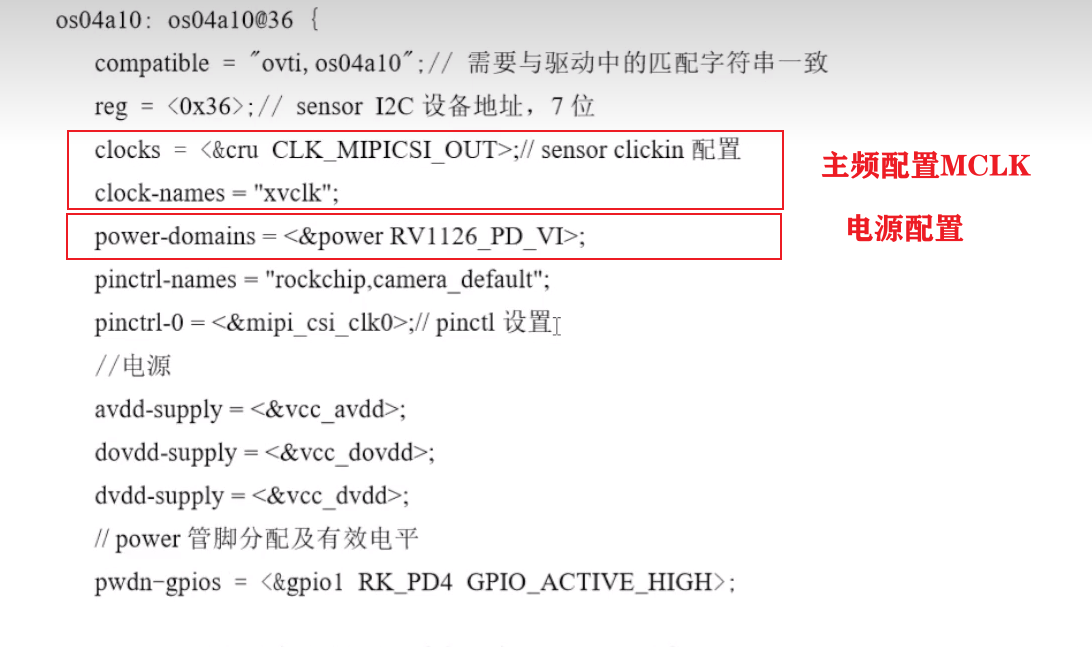
包括其中的3路电源,由datasheet配置

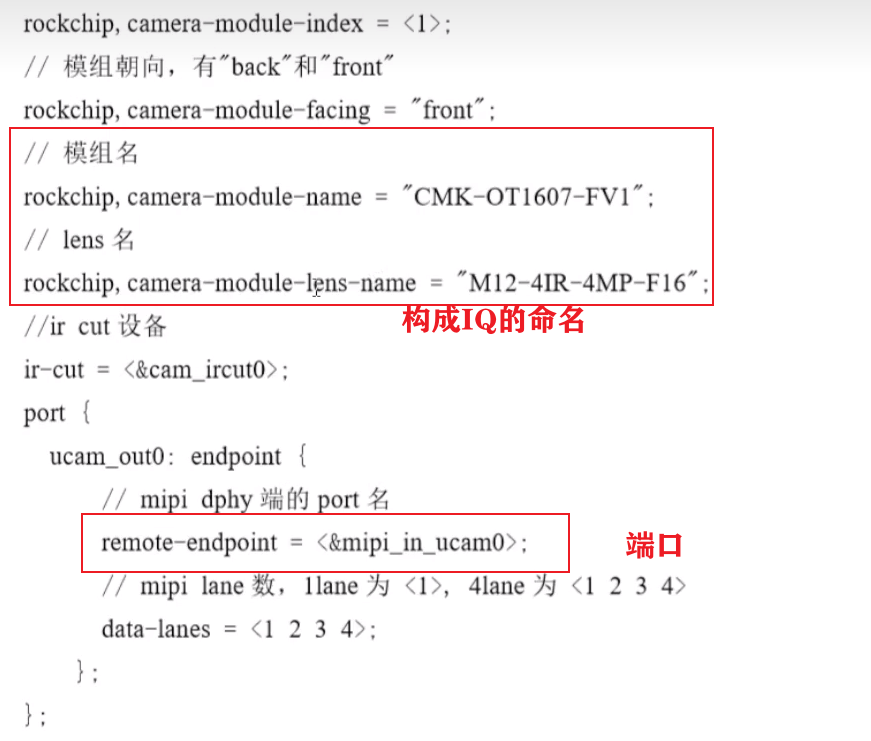
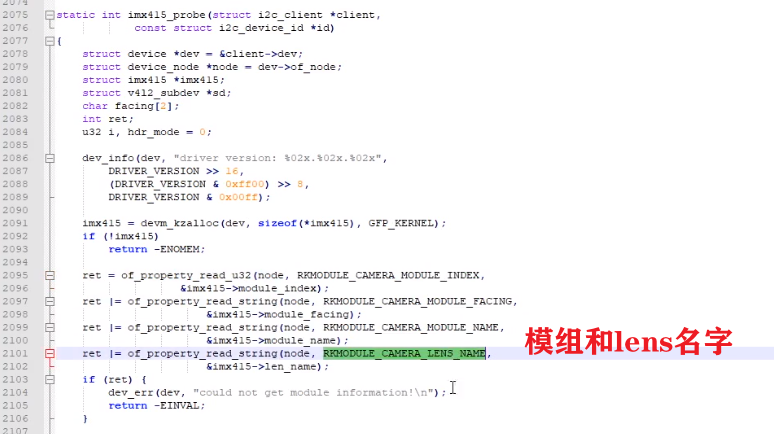
模组和lens名构成了后续isp的IQ名,sensor只有一个端口连接mipi dphy
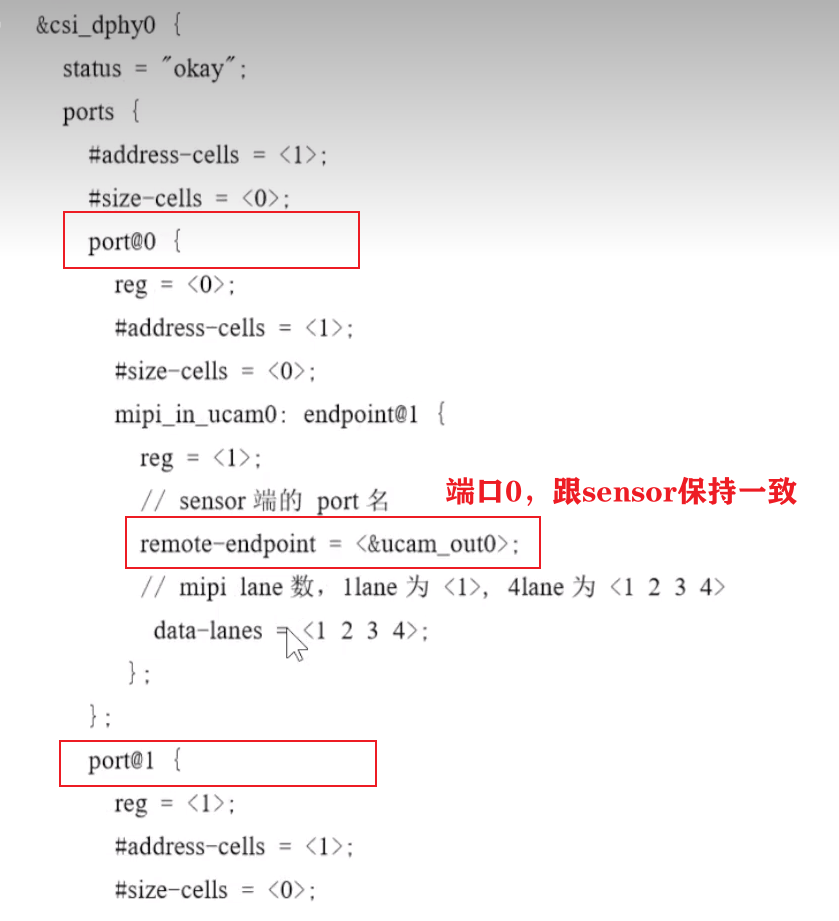
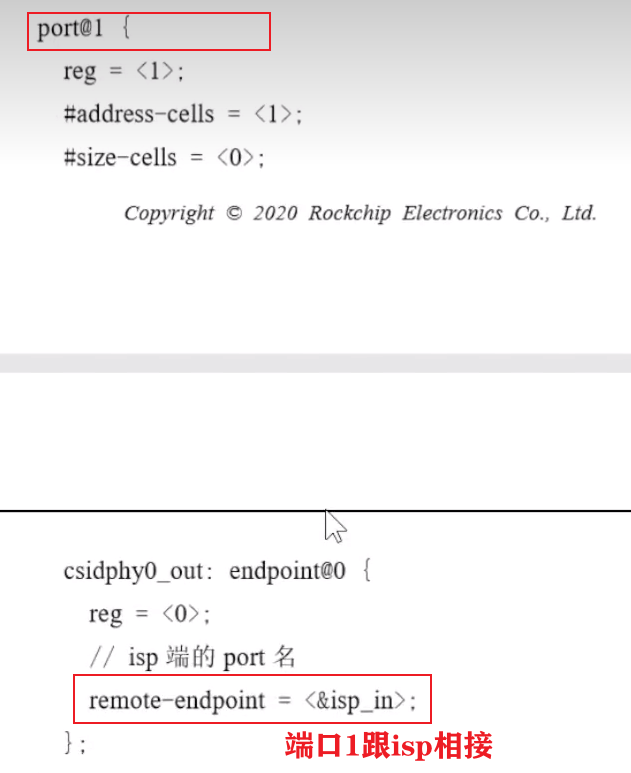
2.1.3csi_phy注册
这里由2个端口,端口0跟sensor端口保持一致,用来接收sensor数据;端口1跟isp端口保持一致,用来传数据给isp
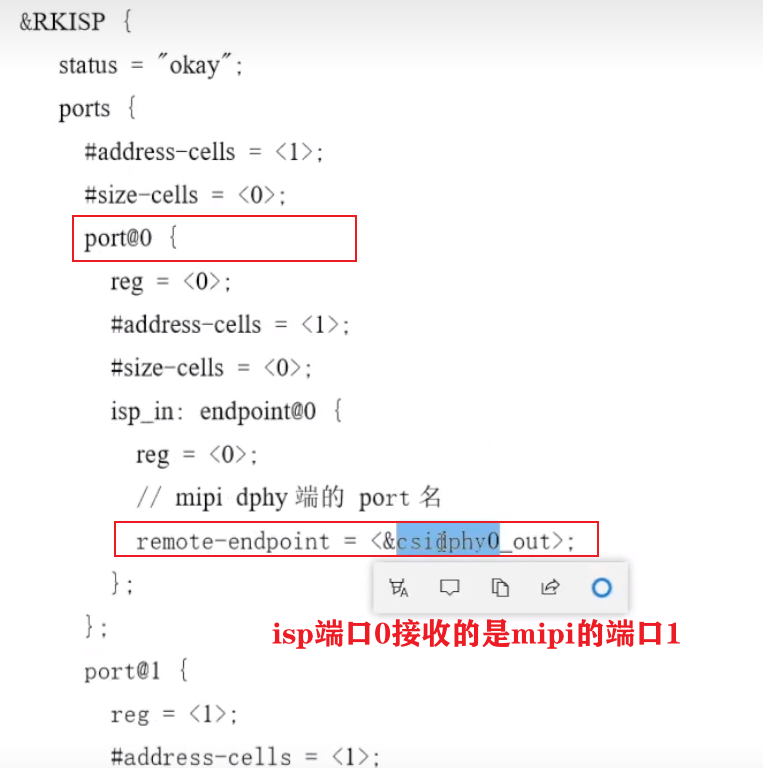
2.1.4isp注册
isp端口0接收的是mipi的端口1
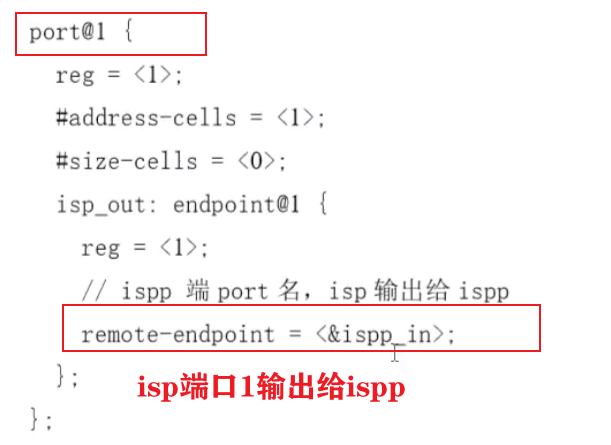
端口1输出给ispp
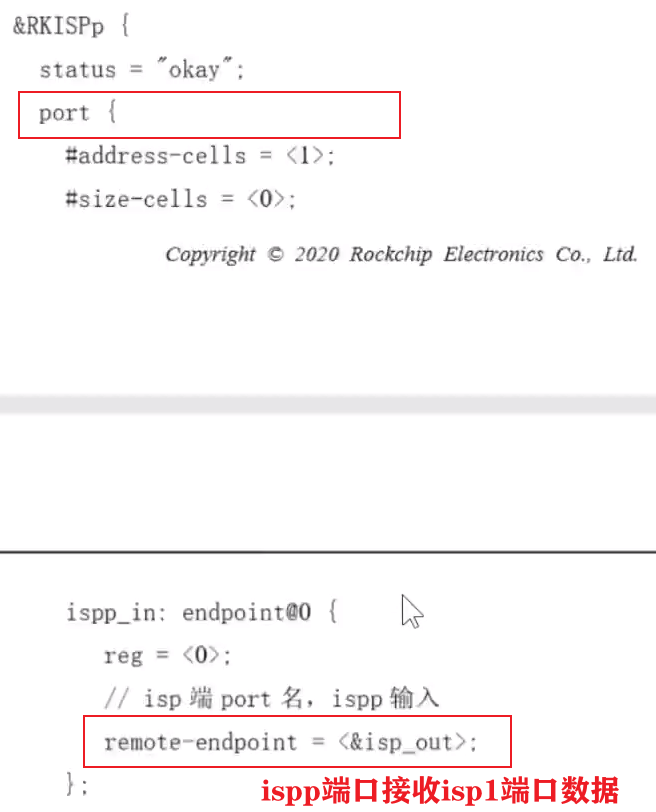
2.1.5ispp注册
ispp端口接收isp1端口数据
2.2CIS驱动说明
Camera Sensor采用I2C与主控进行交互,目前sensor driver按照I2C设备驱动方式实现,sensor driver同时采用v4l2 subdev的方式实现与host driver之间的交互。
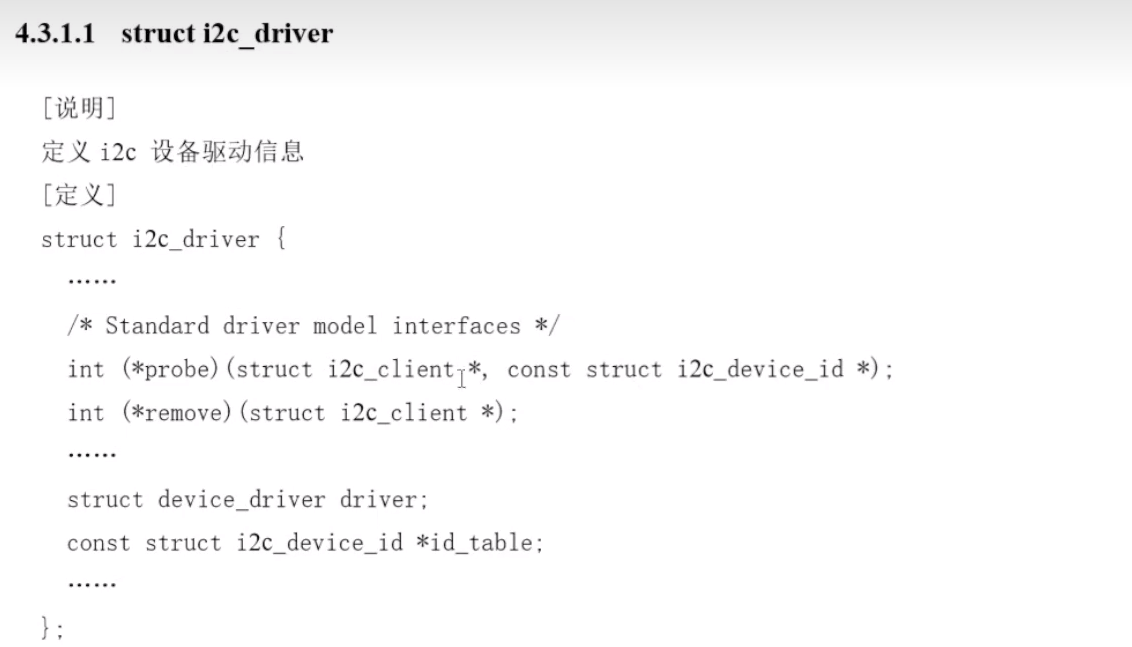
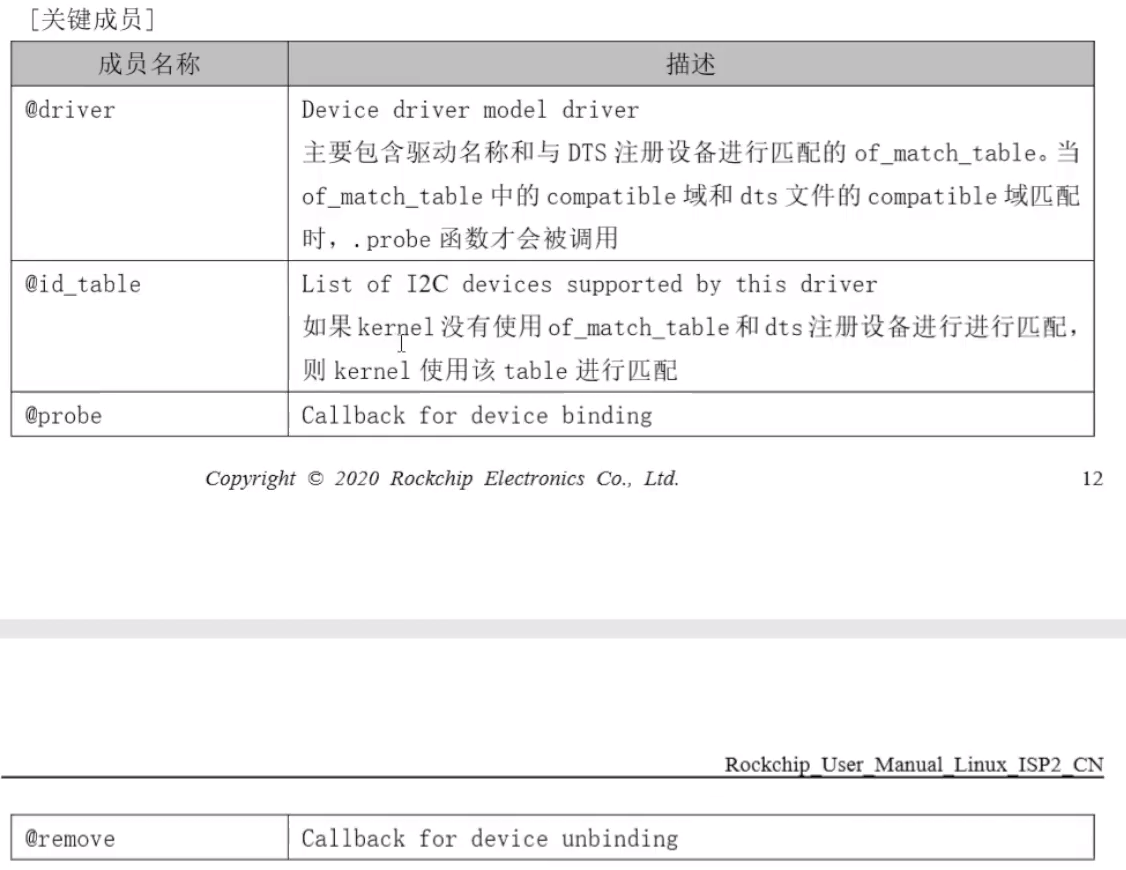
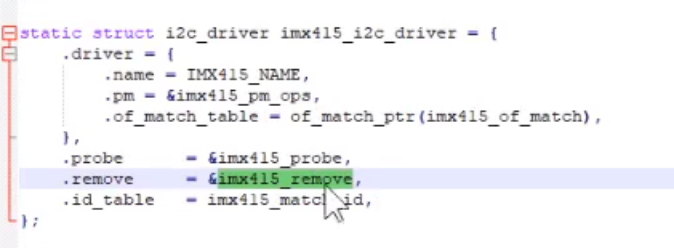
2.2.1数据类型简要说明-结构体i2c_driver
关于结构体i2c_driver
1struct i2c_driver {
2 ...
3 int (*probe)(struct i2c_client *, const struct i2c_device_id *);
4 int (*remove)(struct i2c_client *)
5 ...
6 struct device_driver driver;
7 const struct i2c_device_id *id_table;
8 ...
9};
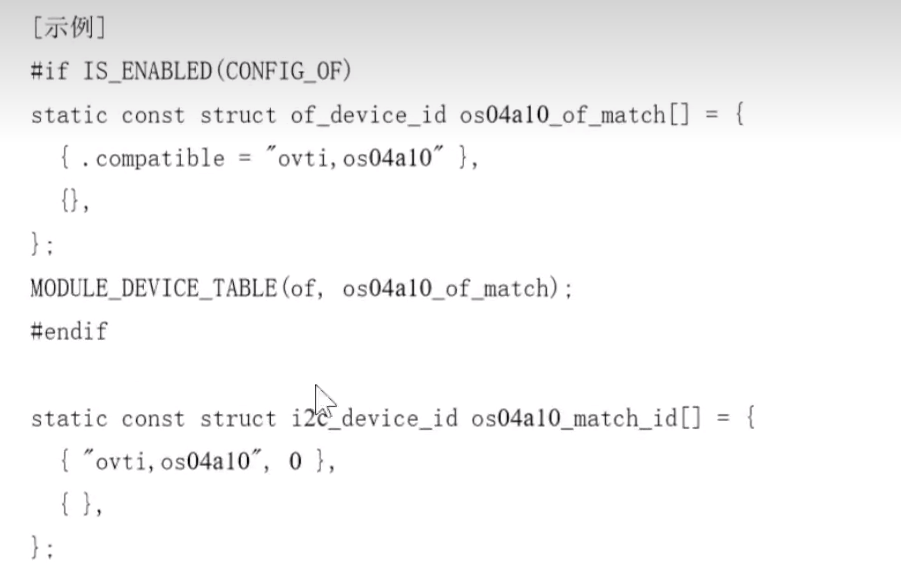
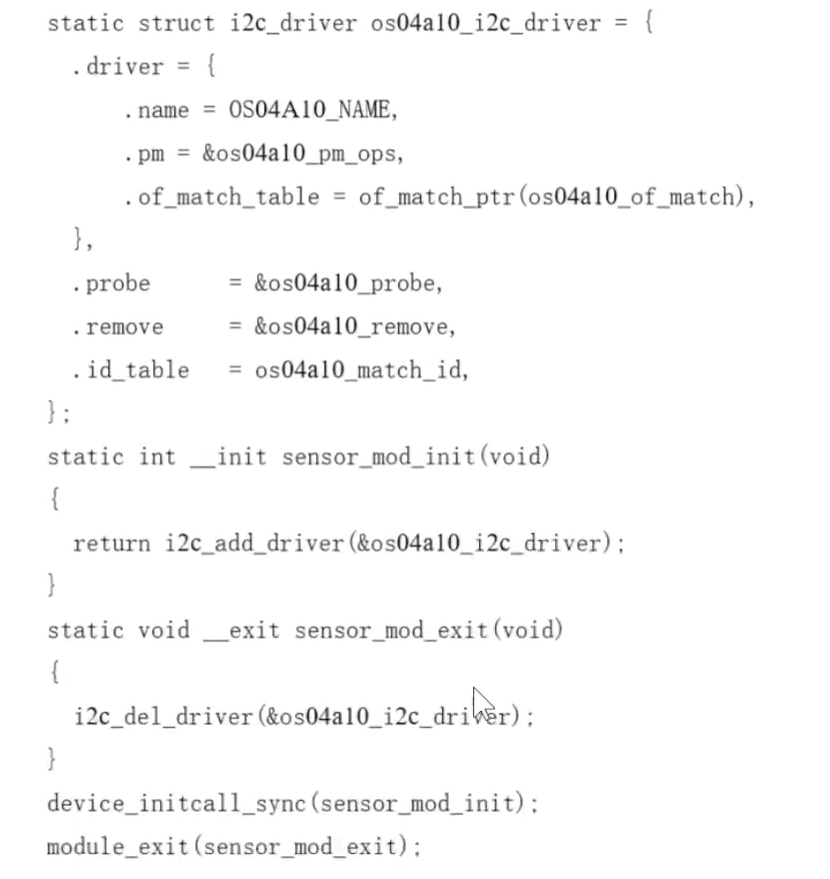
举例说明
2.2.2数据类型简要说明-结构体struct v4l2_subdev_ops
结构体如下
1struct v4l2_subdev_ops {
2 const struct v4l2_subdev_core_ops *core;
3 ...
4 const struct v4l2_subdev_video_ops *video;
5 ...
6 const struct v4l2_subdev_pad_ops *pad;
7};
具体说明
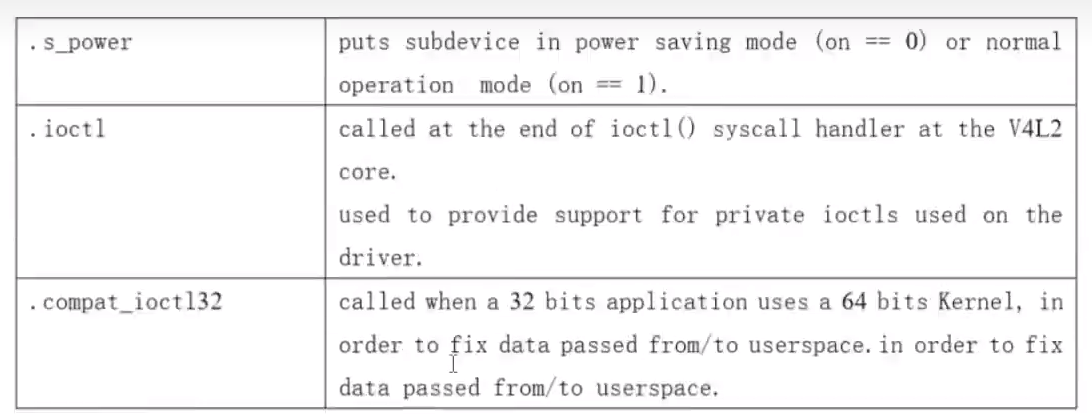
2.2.3数据类型简要说明-结构体struct v4l2_subdev_core_ops
结构体
1struct v4l2_subdev_core_ops {
2 ...
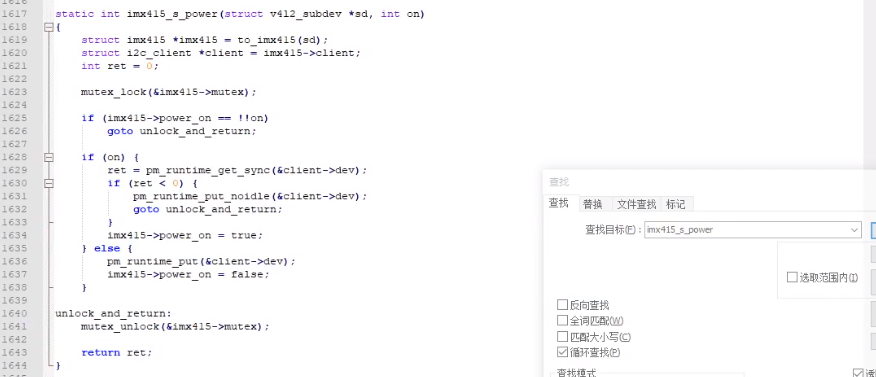
3 int (*s_power)(struct v4l2_subdev *sd, int on);
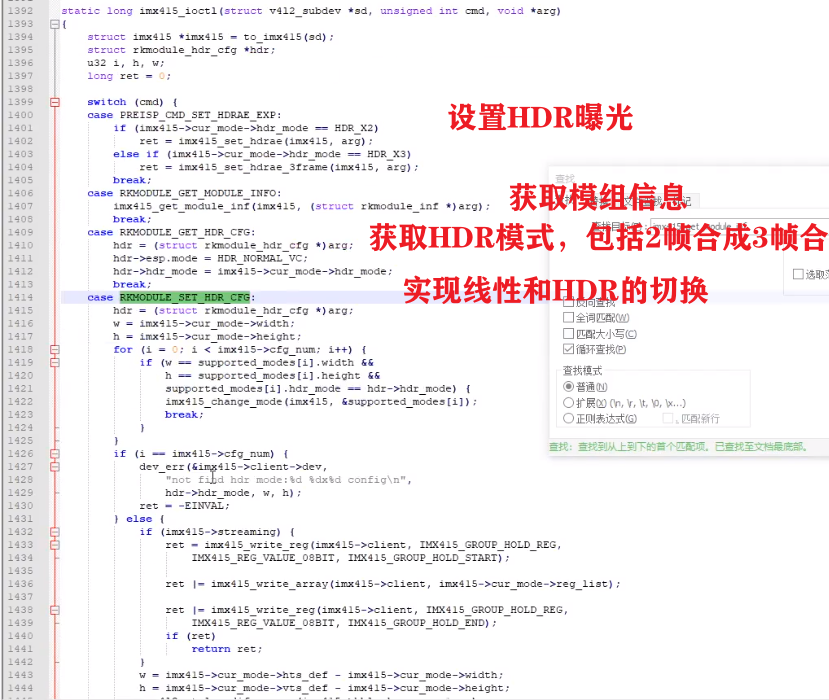
4 long (*ioctl)(struct v4l2_subdev *sd, unsigned int cmd, void *arg);
5#ifdef CONFIG_COMPAT
6 long (*compat_ioctl32)(struct v4l2_subdev *sd, unsigned int cmd, unsigned long arg);
7#endif
8 ...
9};
示例说明
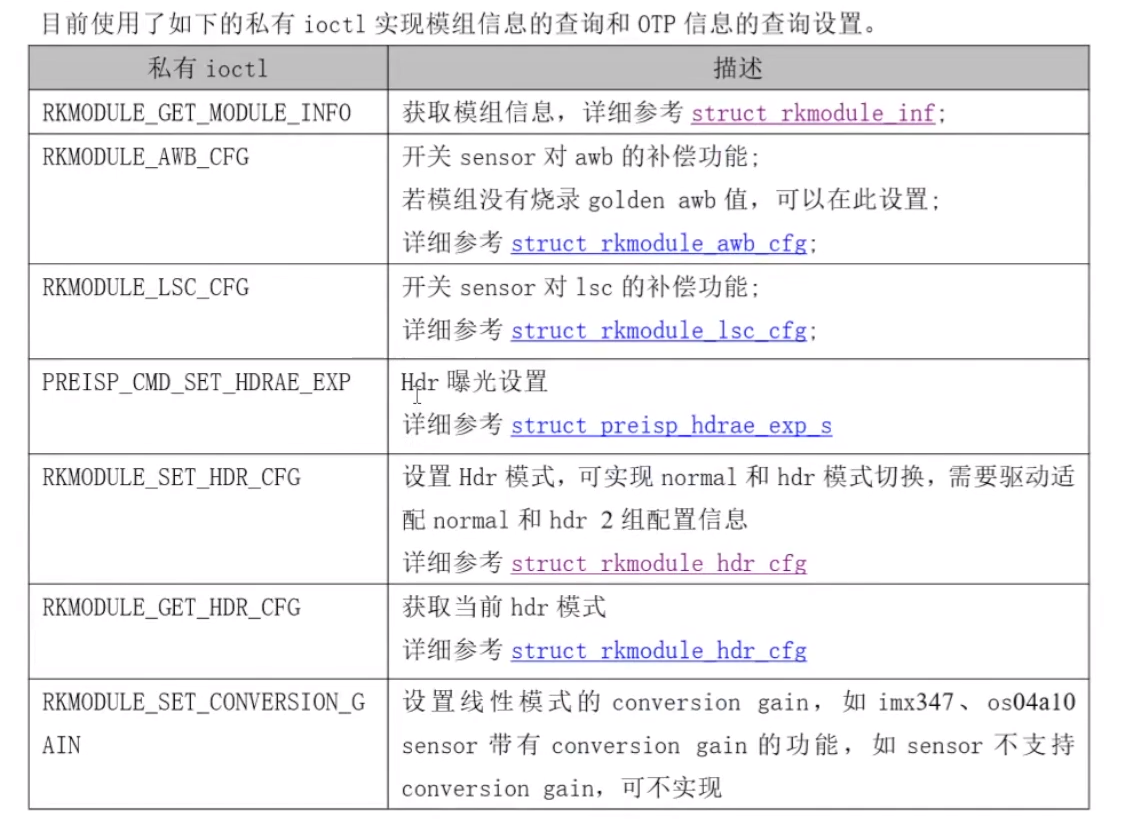
RK目前的ioctl号
2.2.4数据类型简要说明-结构体struct v4l2_subdev_video_ops
结构体说明
1struct v4l2_subdev_video_ops {
2 ...
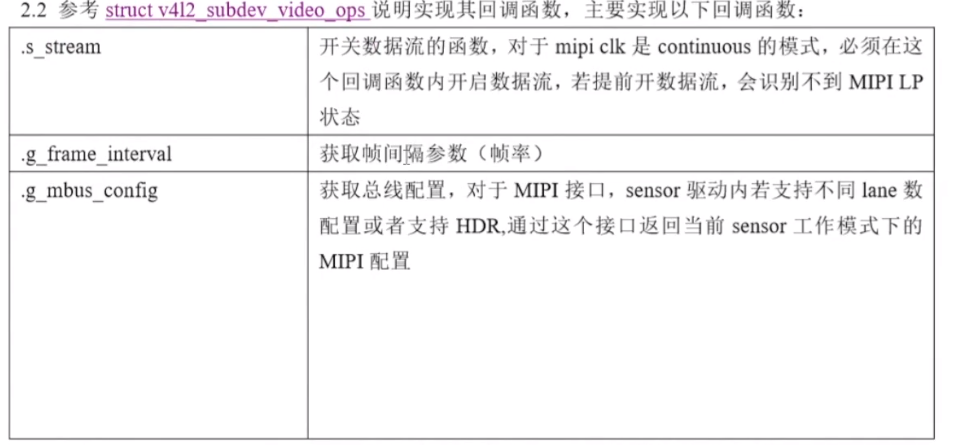
3 int (*s_stream)(struct v4l2_subdev *sd, int enable);
4 ...
5 int (*g_frame_interval)(struct v4l2_subdev *sd, struct v4l2_subdev_frame_interval *interval);
6 int (*g_mbus_config)(struct v4l2_subdev *sd, struct v4l2_mbus_config *cfg);
7};

示例说明
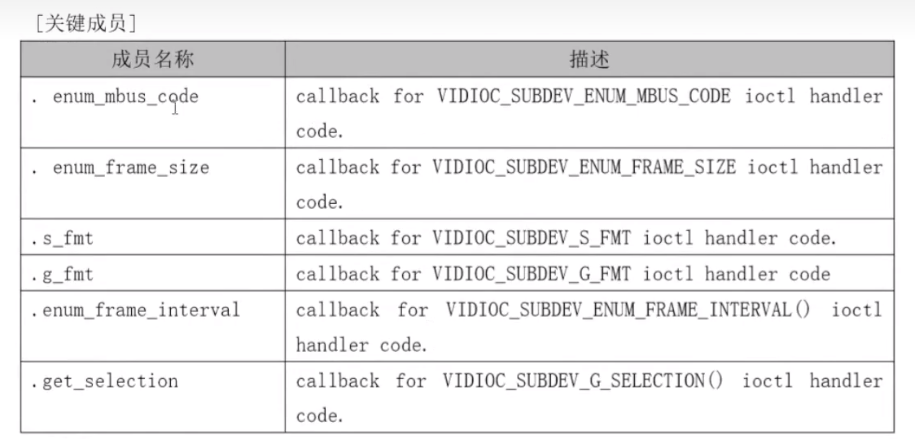
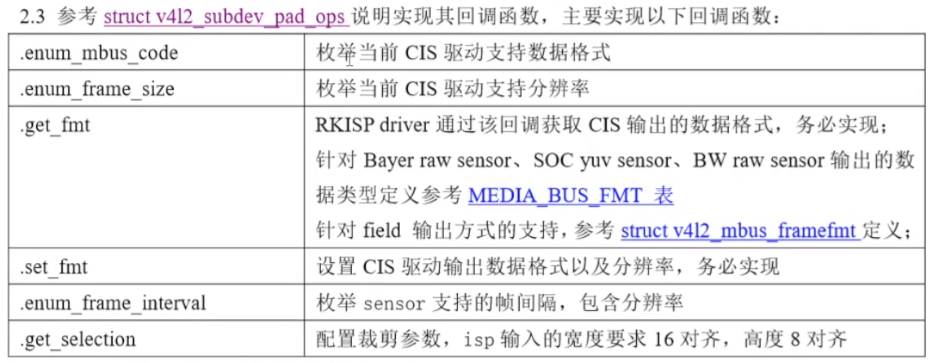
2.2.5数据类型简要说明-结构体struct v4l2_subdev_pad_ops
结构体说明
1struct v4l2_subdev_pad_ops {
2 ...
3 int (*enum_mbus_core)(struct v4l2_subdev *sd,
4 struct v4l2_subdev_pad_config *cfg,
5 struct v4l2_subdev_mbus_code_enum *code);
6 int (*enum_frame_size)(struct v4l2_subdev *sd,
7 struct v4l2_subdev_pad_config *cfg,
8 struct v4l2_subdev_frame_size_enum *fse);
9 int (*get_fmt)(struct v4l2_subdev *sd,
10 struct v4l2_subdev_pad_config *cfg,
11 struct v4l2_subdev_format* format);
12 int (*set_fmt)(struct v4l2_subdev *sd,
13 struct v4l2_subdev_pad_config *cfg,
14 struct v4l2_subdev_format* format);
15 int (*enum_frame_interval)(struct v4l2_subdev *sd,
16 struct v4l2_subdev_pad_config *cfg,
17 struct v4l2_subdev_frame_interval_enum *file);
18 int (*get_selection)(struct v4l2_subdev *sd,
19 struct v4l2_subdev_pad_config *cfg,
20 struct v4l2_subdev_selection *sel);
21};
示例说明
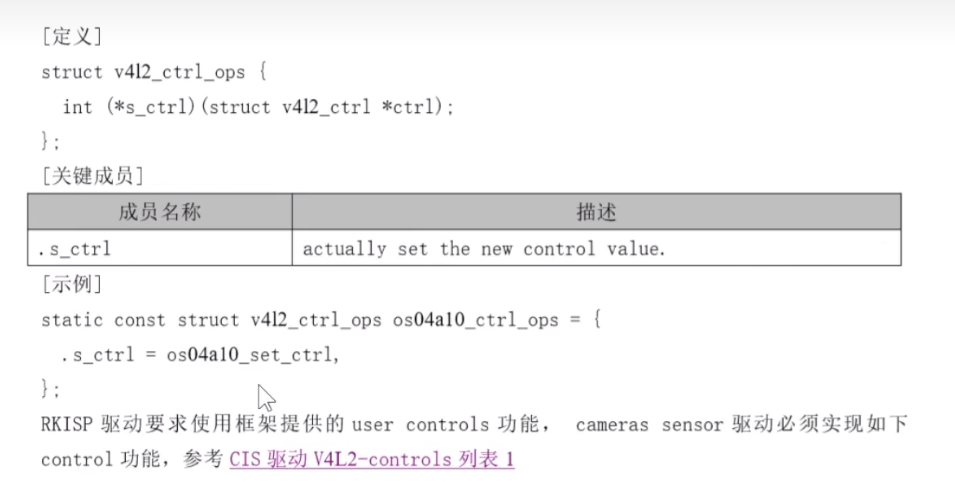
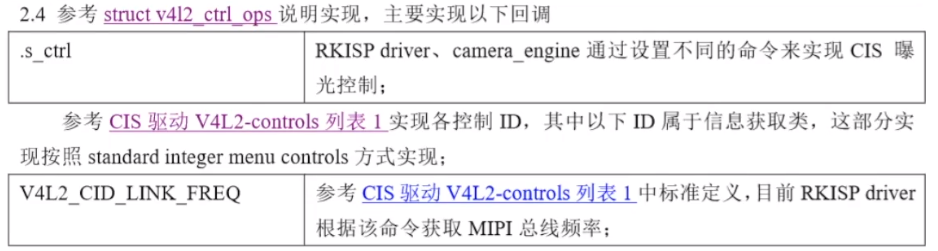
2.2.5数据类型简要说明-结构体struct v4l2_ctrl_ops
结构体说明
1struct v4l2_ctrl_ops {
2 int (*s_ctrl)(struct v4l2_ctrl *ctrl);
3};
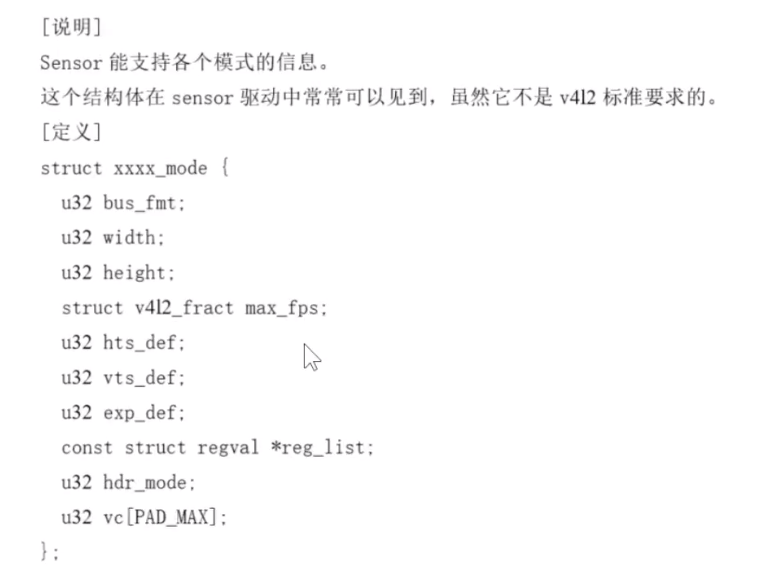
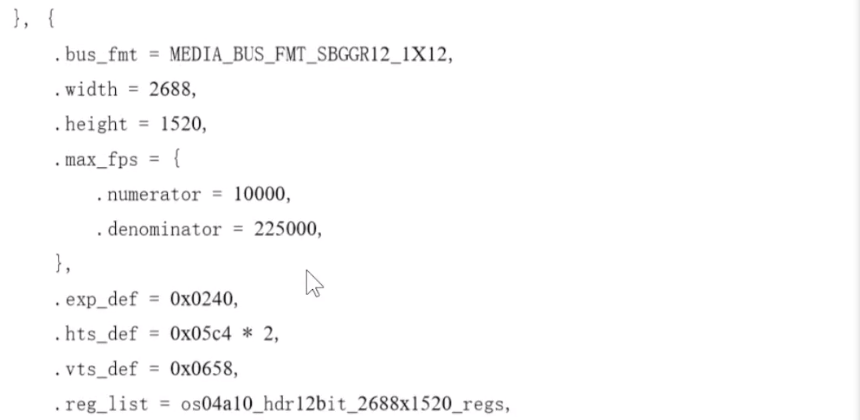
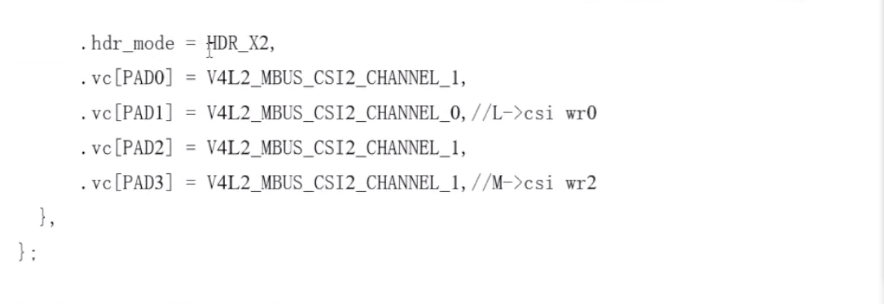
2.2.6数据类型简要说明-结构体-struct xxxx_mode
结构体说明,这个结构体在sensor驱动中常常可以见到,虽然它不是v4l2标准要求的
1struct xxxx_mode {
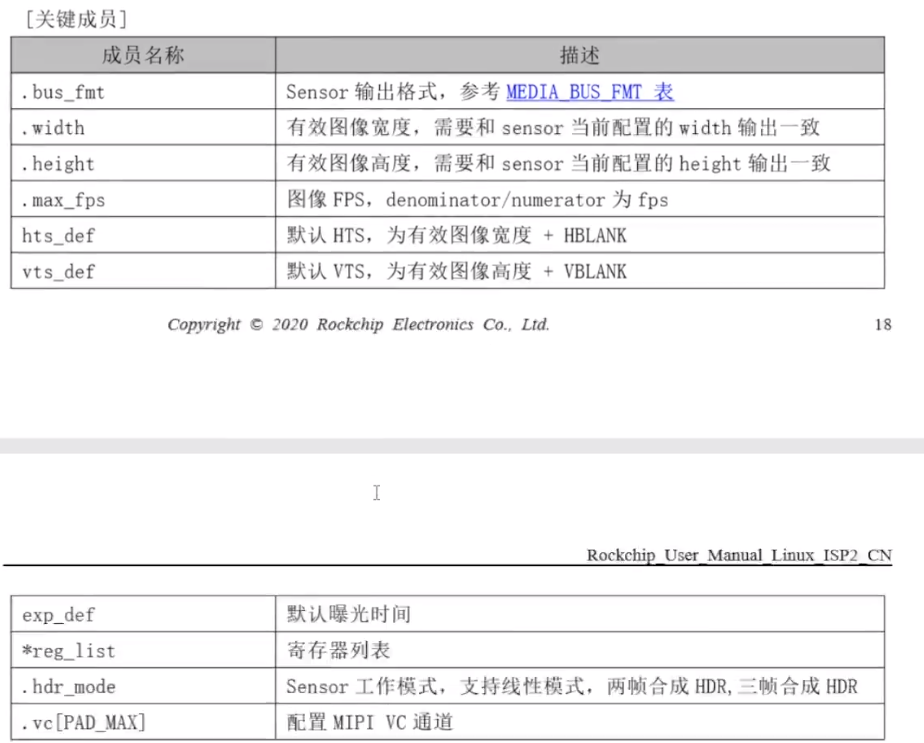
2 u32 bus_fmt;
3 u32 width;
4 u32 height;
5 struct v4l2_fract max_fps;
6 u32 hts_def;
7 u32 vts_def;
8 u32 exp_def;
9 const struct regval *reg_list;
10 u32 hdr_mode;
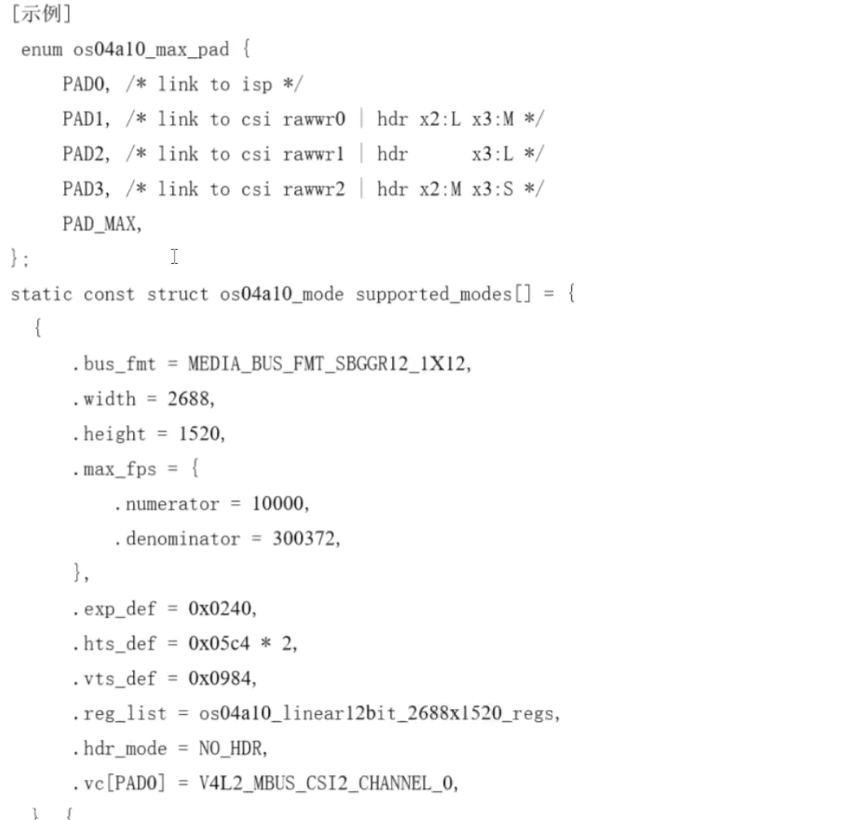
11 u32 vc[PAD_MAX];
12};
示例说明
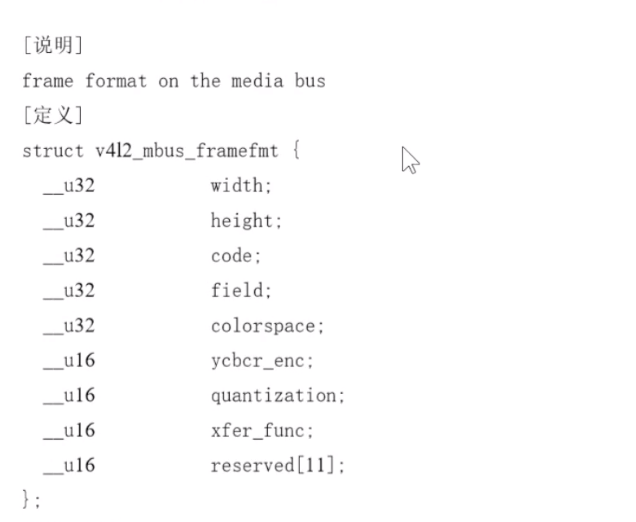
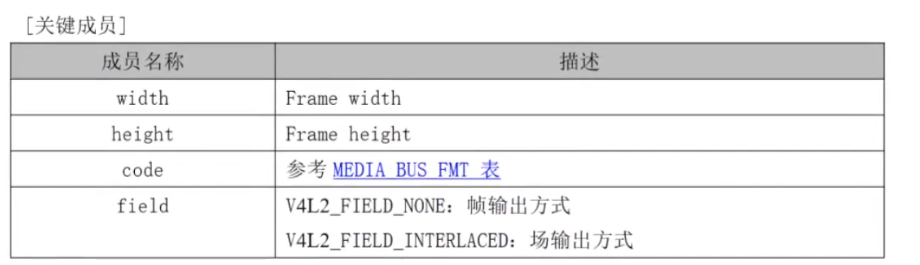
2.2.7数据类型简要说明-结构体-struct v4l2_mbus_framefmt
结构体说明
1struct v4l2_mbus_framefmt {
2 __u32 width;
3 __u32 height;
4 __u32 code;
5 __u32 field;
6 __u32 colorspace;
7 __u16 ycbcr_enc;
8 __u16 quantization;
9 __u16 xfer_func;
10 __u16 reserved[11];
11};
2.2.8数据类型简要说明-结构体-struct rkmodule_base_inf
结构体说明
1struct rkmodule_base_inf{
2 char sensor[RKMODULE_NAME_LEN];
3 char module[RKMODULE_NAME_LEN];
4 char lens[RKMODULE_NAME_LEN];
5} __attribute__ ((packed));

2.2.9数据类型简要说明-结构体-struct rkmodule_fac_inf
结构体说明
1struct rkmodule_fac_inf {
2 __32 flag;
3 char module[RKMODULE_NAME_LEN];
4 char lens[RKMODULE_NAME_LEN];
5 __u32 year;
6 __u32 month;
7 __u32 day;
8} __attribute__ ((packed));
考虑到不是所有sensor都会用到OTP功能,这里不具体展开
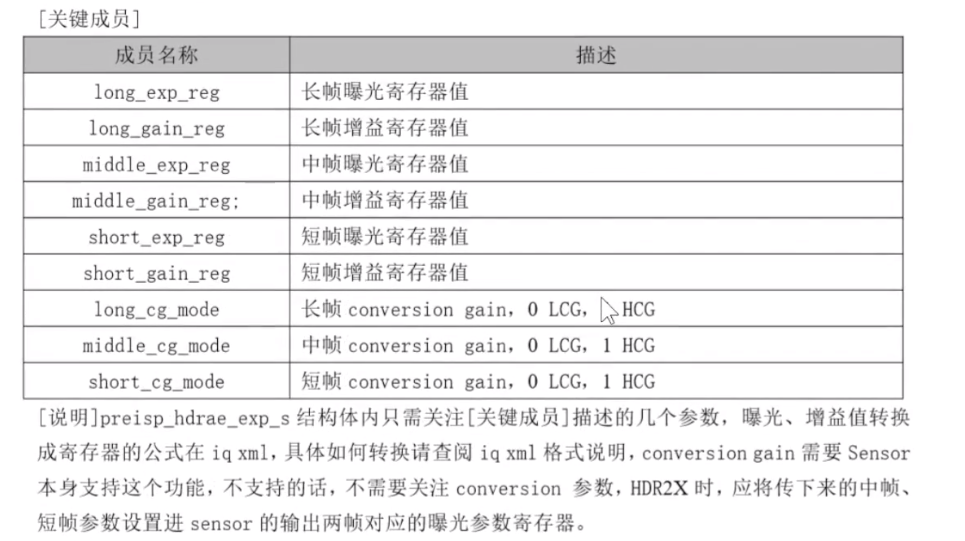
2.2.10数据类型简要说明-结构体-struct preisp_hdrae_exp_s
结构体说明,HDR曝光参数
1struct preisp_hdrae_exp_s {
2 unsigned int long_exp_reg;
3 unsigned int long_gain_reg;
4 unsigned int middle_exp_reg;
5 unsigned int middle_gain_reg;
6 unsigned int short_exp_reg;
7 unsigned int short_gain_reg;
8 unsigned int long_exp_val;
9 unsigned int long_gain_reg;
10 unsigned int middle_exp_val;
11 unsigned int middle_gain_val;
12 unsigned int short_exp_val;
13 unsigned int short_gain_val;
14 unsigned int long_cg_mode;
15 unsigned int middle_cg_mode;
16 unsigned int short_cg_mode;
17};
3API简要介绍
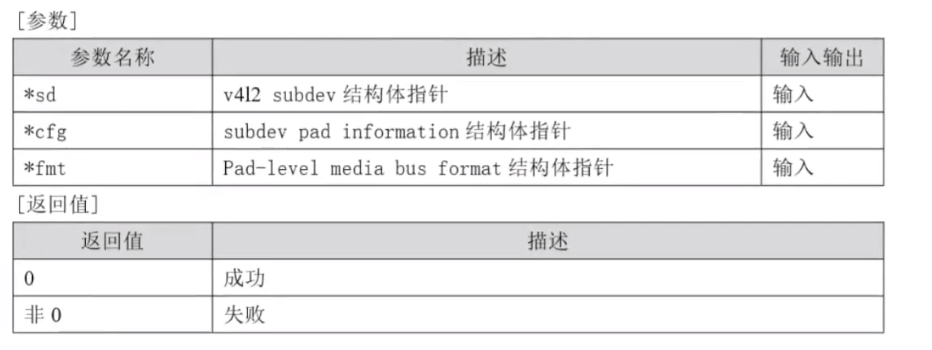
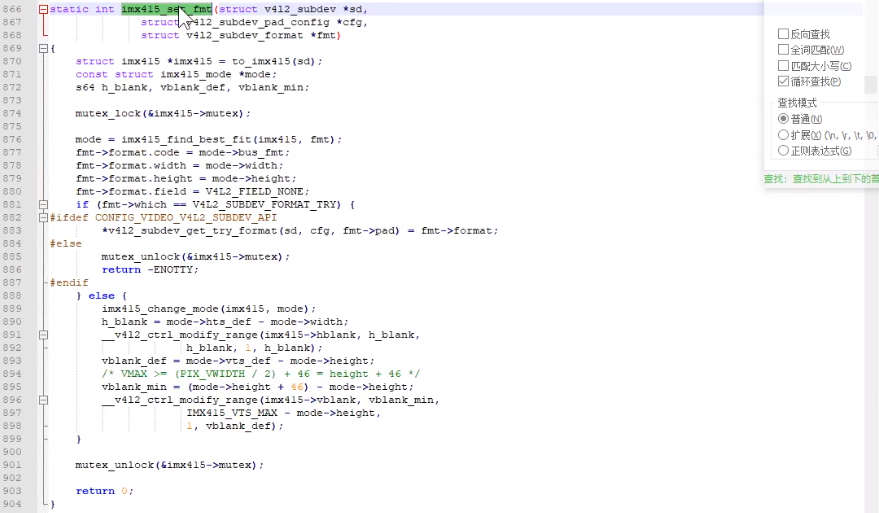
3.1xxx_set_fmt
设置sensor输出格式
语法说明
1static int xxx_set_fmt(struct v4l2_subdev *sd,
2 struct v4l2_subdev_pad_config *cfg,
3 struct v4l2_subdev_format *fmt);
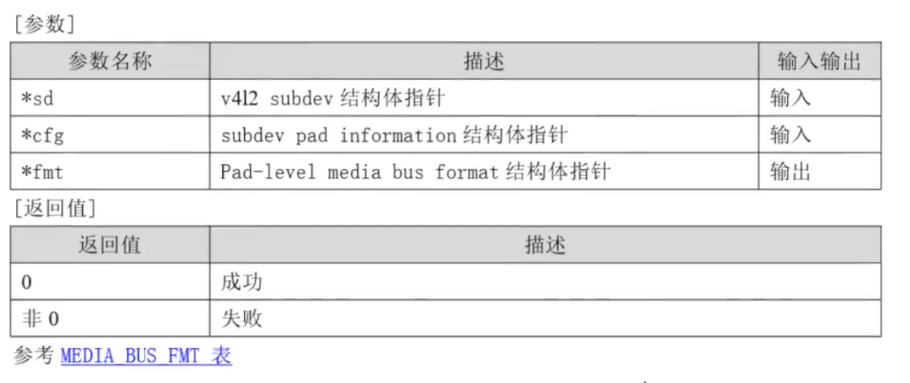
3.2xxx_get_fmt
获取sensor输出格式
语法说明
1static int xxx_get_fmt(struct v4l2_subdev *sd,
2 struct v4l2_subdev_pad_config *cfg,
3 struct v4l2_subdev_format *fmt);
3.3xxx_enum_mbus_code
枚举sensor输出bus format
语法说明
1static int xxx_enum_mbus_code(struct v4l2_subdev *sd,
2 struct v4l2_subdev_pad_config *cfg,
3 struct v4l2_subdev_mbus_code_enum *code);
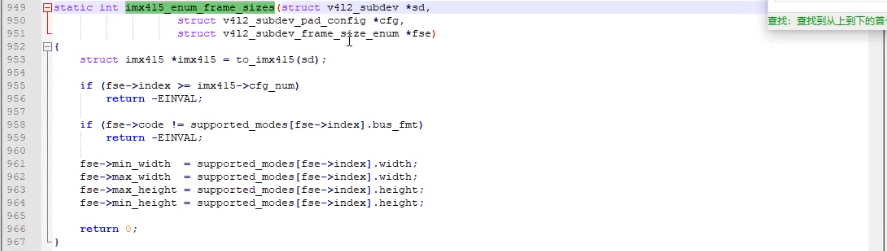
3.4xxx_enum_frame_size
枚举sensor输出大小
语法
1static int xxx_enum_frame_size(struct v4l2_subdev *sd,
2 struct v4l2_subdev_pad_config *cfg,
3 struct v4l2_subdev_frame_size_enum *fse);
3.5xxx_g_frame_interval
获取sensor输出fps
语法
1static int xxx_g_frame_interval(struct v4l2_subdev *sd,
2 struct v4l2_subdev_frame_interval *fi);
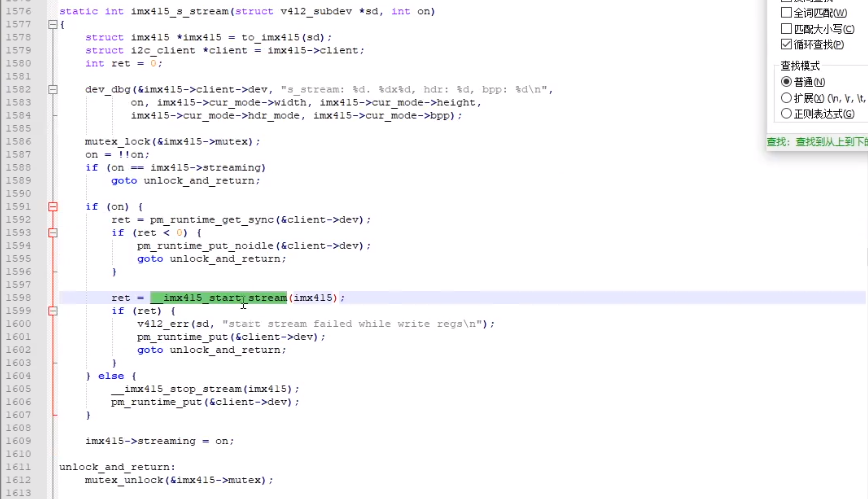
3.6xxx_s_stream
设置stream输入输出
语法
1static int xxx_s_stream(struct v4l2_subdev *sd, int on);
3.7xxx_runtime_resume
sensor商店时的回调函数
语法
1static int xxx_runtime_resume(struct device *dev);
3.8xxx_runtime_suspend
sensor下电是的回调函数
语法
1static int xxx_runtime_suspend(struct device *dev);
3.9xxx_set_ctrl
设置各个control的值
语法
1static int xxx_set_ctrl(struct v4l2_ctrl *ctrl);
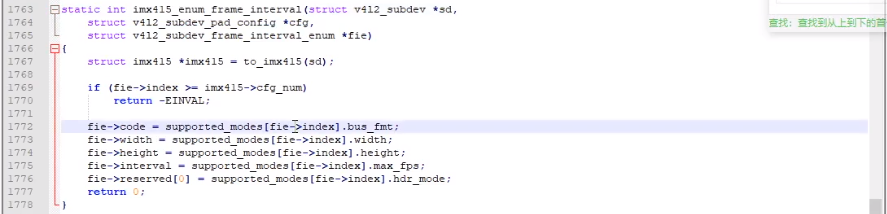
3.10xxx_enum_frame_interval
枚举sensor支持的帧间间隔参数
语法
1static int xxx_enum_frame_interval(struct v4l2_subdev *sd,
2 struct v4l2_subdev_pad_config *cfg,
3 struct v4l2_subdev_frame_interval_enum *fie);
3.11xxx_g_mbus_config
获取支持的总线配置,比如使用mipi时,当sensor支持多种MIPI传输模式时,可以根据Sensor当前使用的MIPI模式上传参数
语法
1static int xxx_g_mbus_config(struct v4l2_subdev *sd,
2 struct v4l2_mbus_config *cfg);
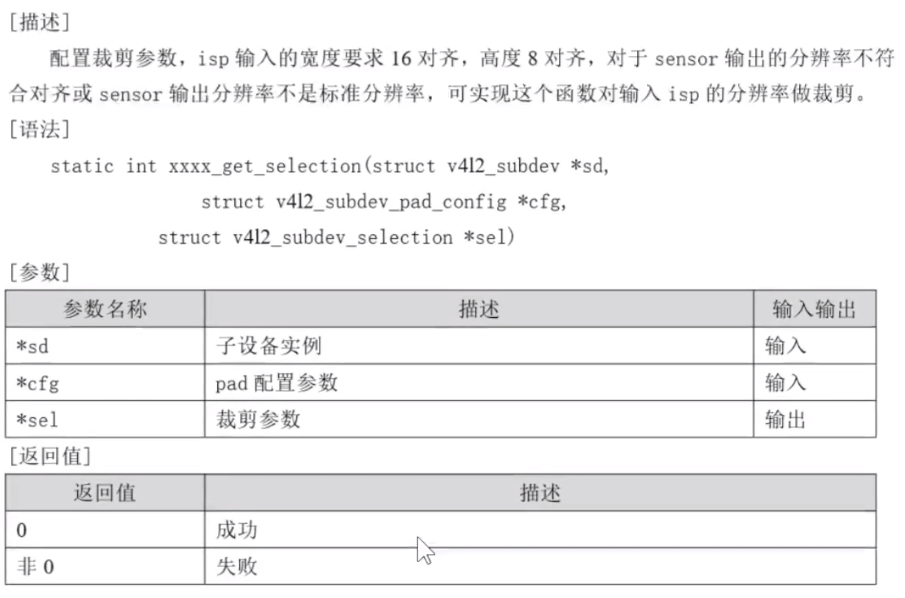
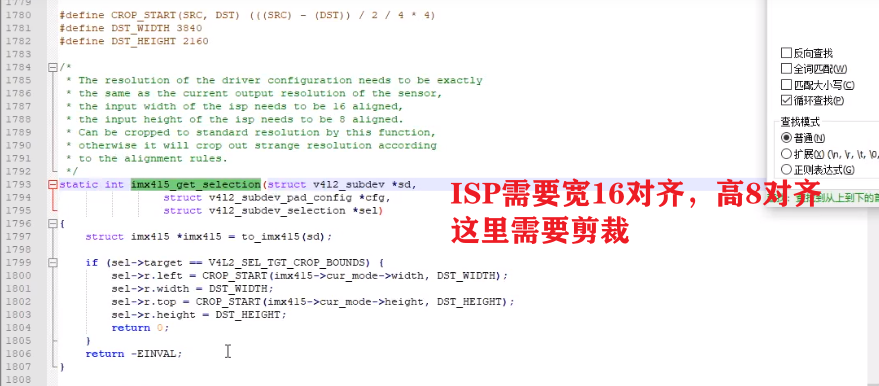
3.12xxx_get_selection
配置剪裁参数,isp输入的宽度要求16对其,高度8对齐,对于sensor输出的分辨率不符合对齐或Sensor输出分辨率不足标准分辨率,可实现这个函数对输入isp的分辨率做剪裁。
语法
1static int xxx_get_selection(struct v4l2_subdev *sd,
2 struct v4l2_subdev_pad_config *cfg,
3 struct v4l2_subdev_selection *sel);
4以imx415 sensor驱动为例详解
对应如下
4.1probe函数细节
4.1.1获取模组和sensor名字
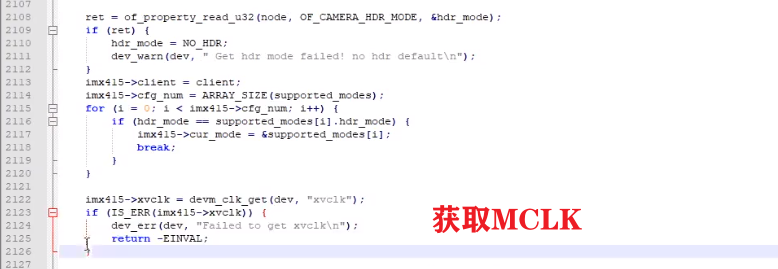
4.1.2获取MCLK
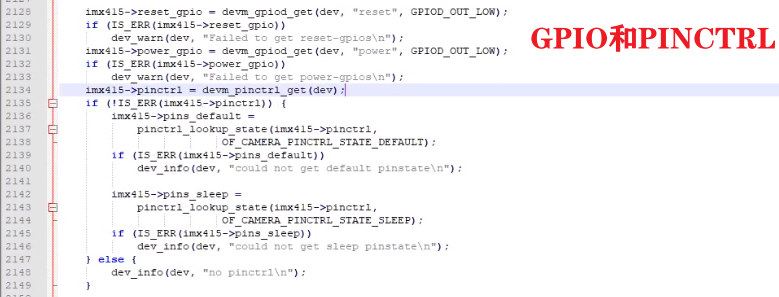
4.1.3GPIO和PINCTRL初始化
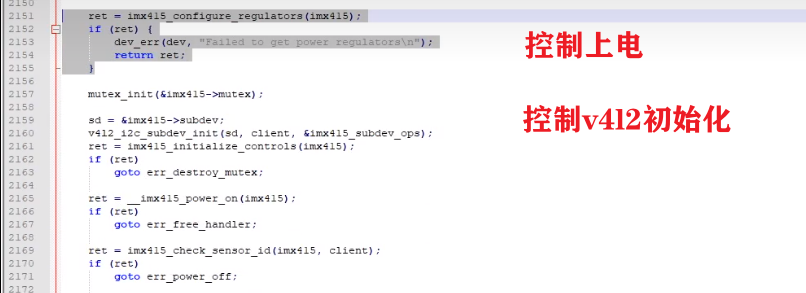
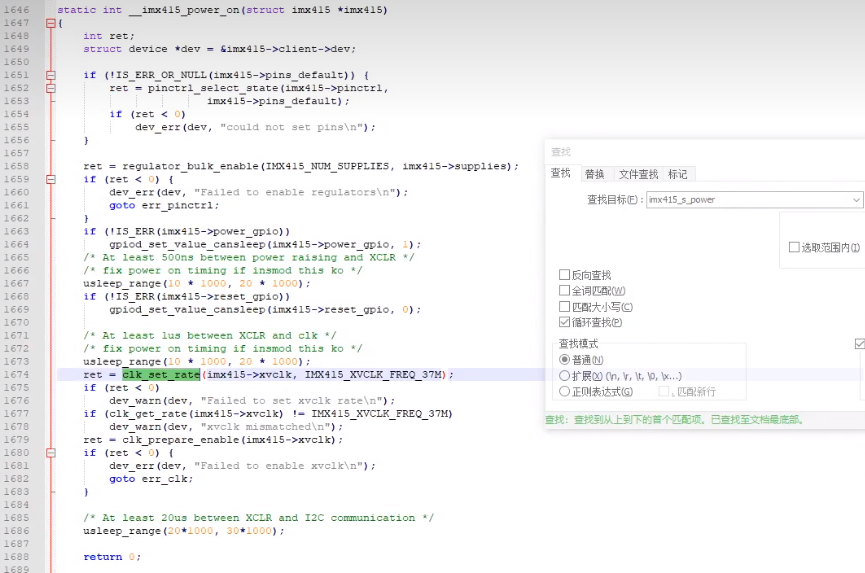
4.1.4控制上电和控制V4L2设备初始化
4.1.5media实体初始化

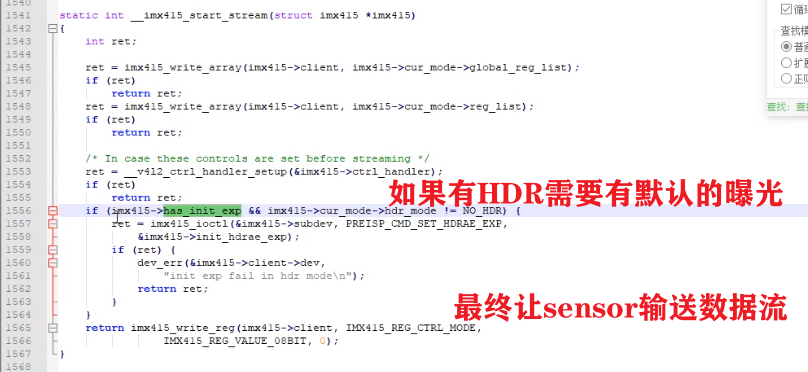
4.2实现3个回调函数

4.2.1结构体v4l2_subdev_core_ops

4.2.2结构体struct v4l2_subdev_video_ops

4.2.3结构体struct v4l2_subdev_pad_ops


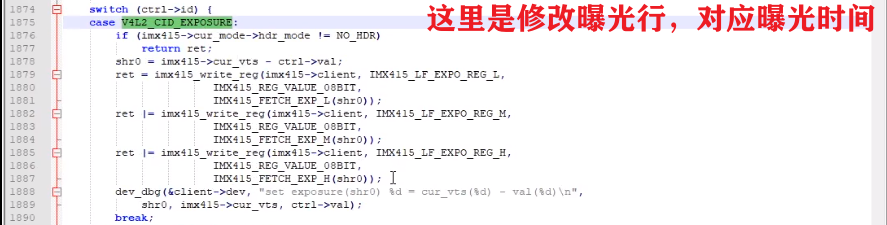
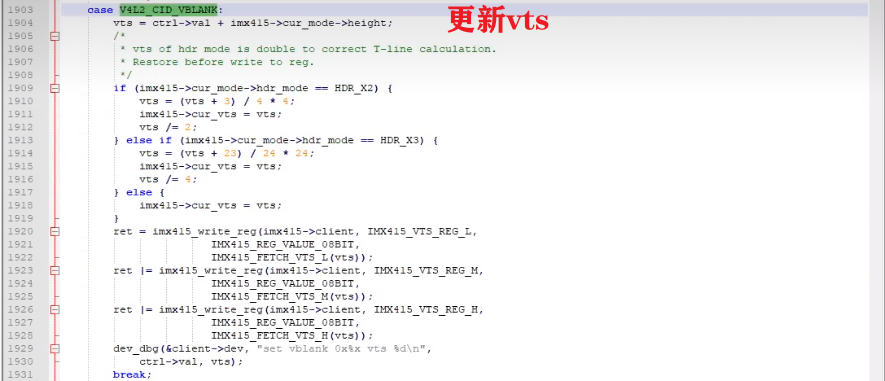
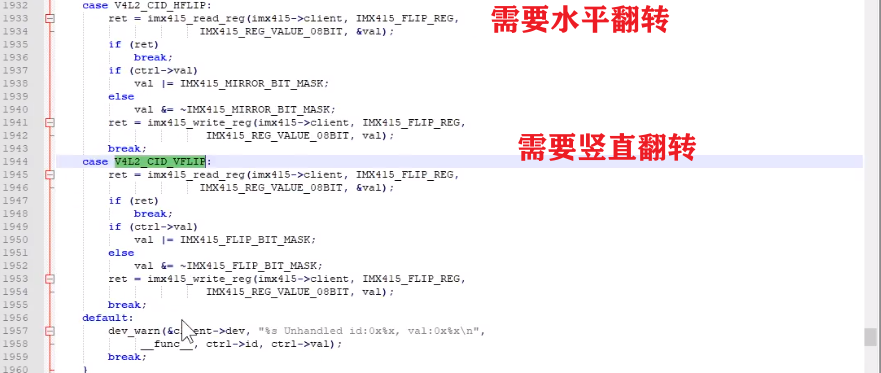
4.2.4结构体struct v4l2_ctrl_ops
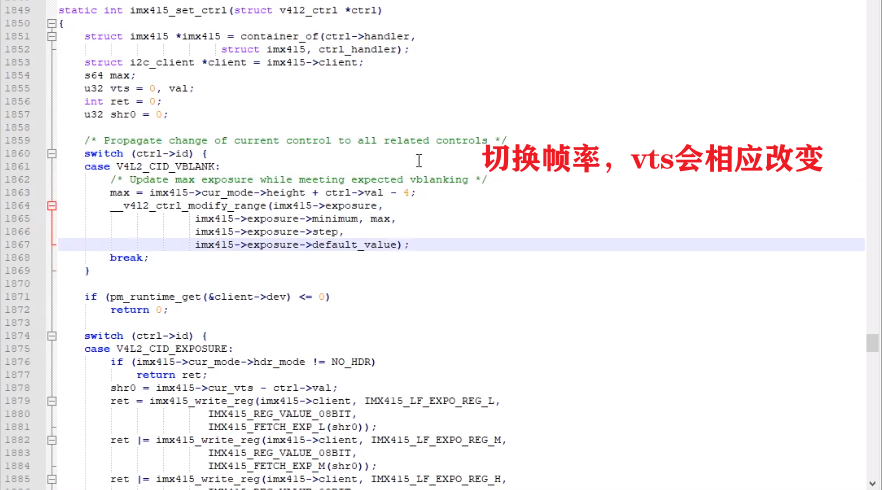

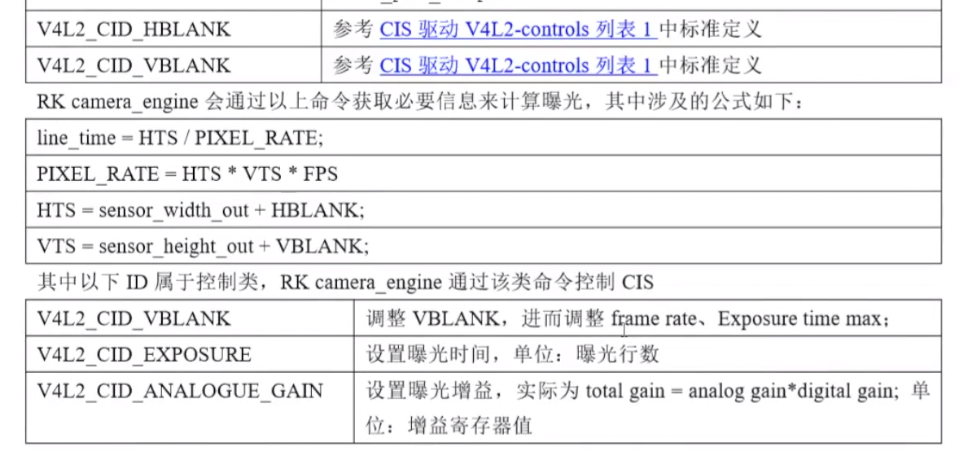
关于这里设计的公式计算
曝光相应计算公式
$$
line_time = HTS/PIXEL_PATE\
PIXEL_PATE=HTSVTSFPS\
HTS=sensor_width_out+HBLANK\
VTS=sensor_g=height_out+VBLANK\
$$