
camera Bayer矩阵
300 Words|Read in about 2 Min|本文总阅读量次
本文主要记录一些关于camera相关的概念和资料,主要是整体的一些概念,细节方面后续会单独有篇章去介绍。
0一些基本概念
开篇先问一个问题
RAW格式、Bayer阵列、RGB格式、HSV格式、YUV格式、JPG格式、JPEG格式等这些专业名词都是什么意思?
说实话,如果是新手或者刚开始接触的时候肯定只能一个个百度。
这里直接将概念阐述清楚
0.1RAW格式
原意就是“未经加工”。
可以理解为:RAW图像就是CMOS或者CCD图像感应器将捕捉到的光源信号转化为数字信号的原始数据。RAW文件是一种记录了数码相机传感器的原始信息,同时记录了由相机拍摄所产生的一些元数据(Metadata,如ISO的设置、快门速度、光圈值、白平衡等)的文件。RAW是未经处理、也未经压缩的格式,可以把RAW概念化为“原始图像编码数据”或更形象的称为“数字底片”。
通俗的说,就是照相机按下快门之后,光信号到达Sensor之后产生的数字信号,等同于以前的老式机械相机的底片,你还看不到里面的图案,只不过是将里面的元素给数字化了。
0.2Bayer阵列
这个格式,也是我们这篇的重点
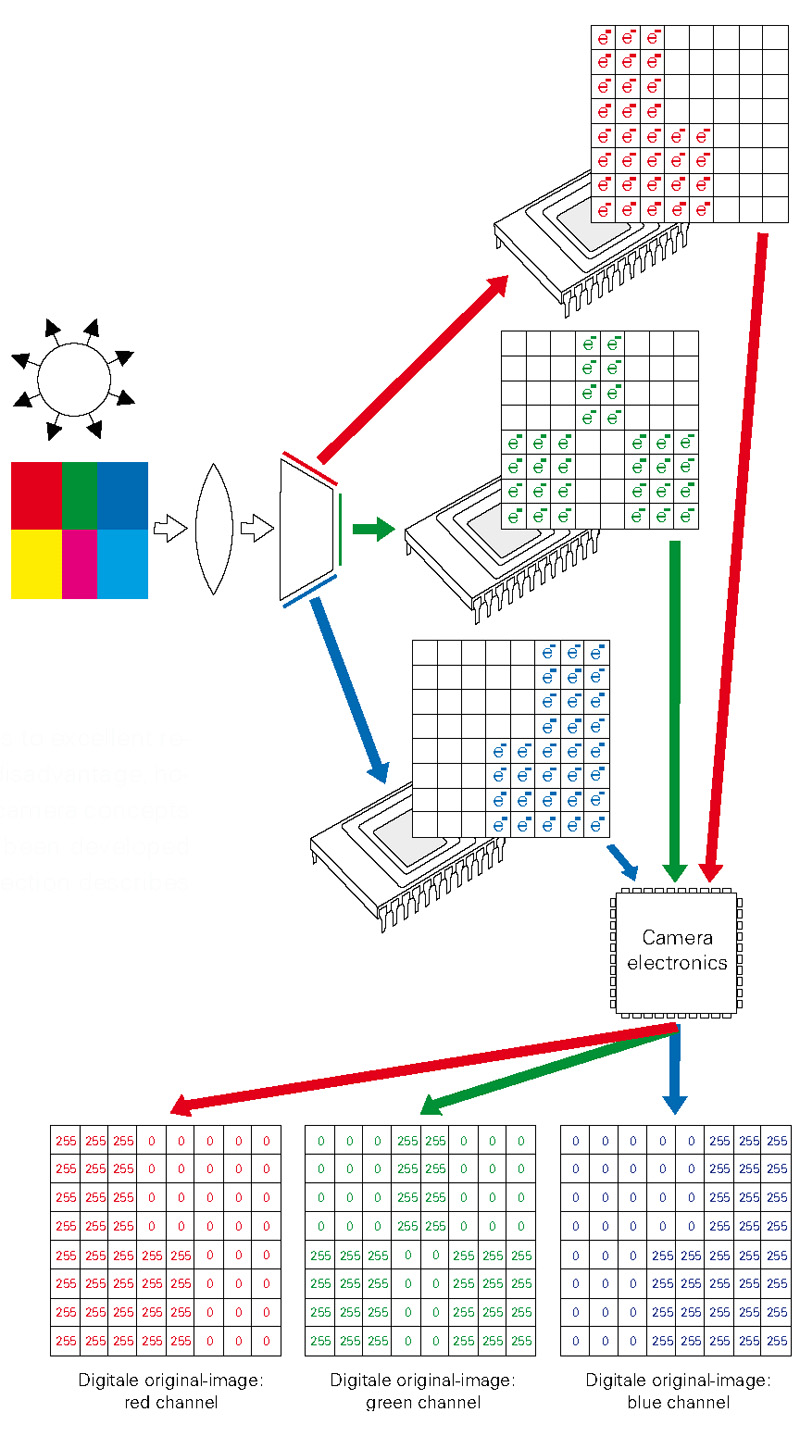
对于彩色图像,需要采集多种最基本的颜色,如rgb三种颜色,最简单的方法就是用滤镜的方法,红色的滤镜透过红色的波长,绿色的滤镜透过绿色的波长,蓝色的滤镜透过蓝色的波长。
如果要采集rgb三个基本色,则需要三块滤镜,这样价格昂贵,且不好制造,因为三块滤镜都必须保证每一个像素点都对齐。当用bayer格式的时候,很好的解决了这个问题。bayer 格式图片在一块滤镜上设置的不同的颜色,通过分析人眼对颜色的感知发现,人眼对绿色比较敏感,所以一般bayer格式的图片绿色格式的像素是是r和g像素的和。
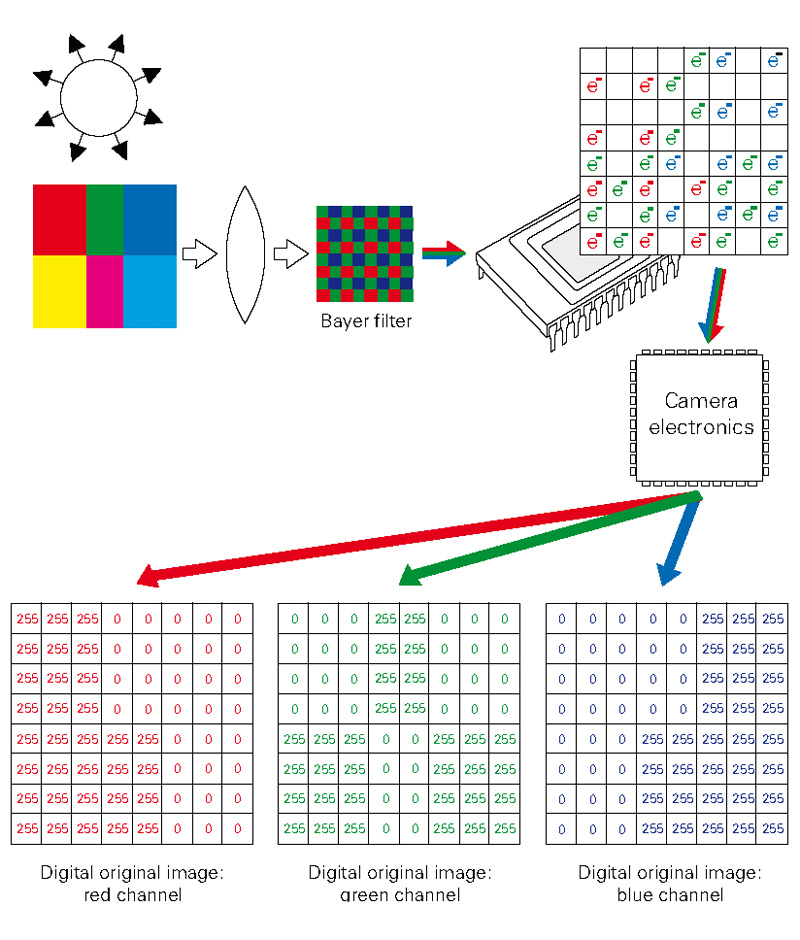
另外,Bayer格式是相机内部的原始图片, 一般后缀名为.raw。很多软件都可以查看, 比如PS。我们相机拍照下来存储在存储卡上的.jpeg或其它格式的图片, 都是从.raw格式转化过来的。如下图,为bayer色彩滤波阵列,由一半的G,1/4的R,1/4的B组成。
0.3RGB格式
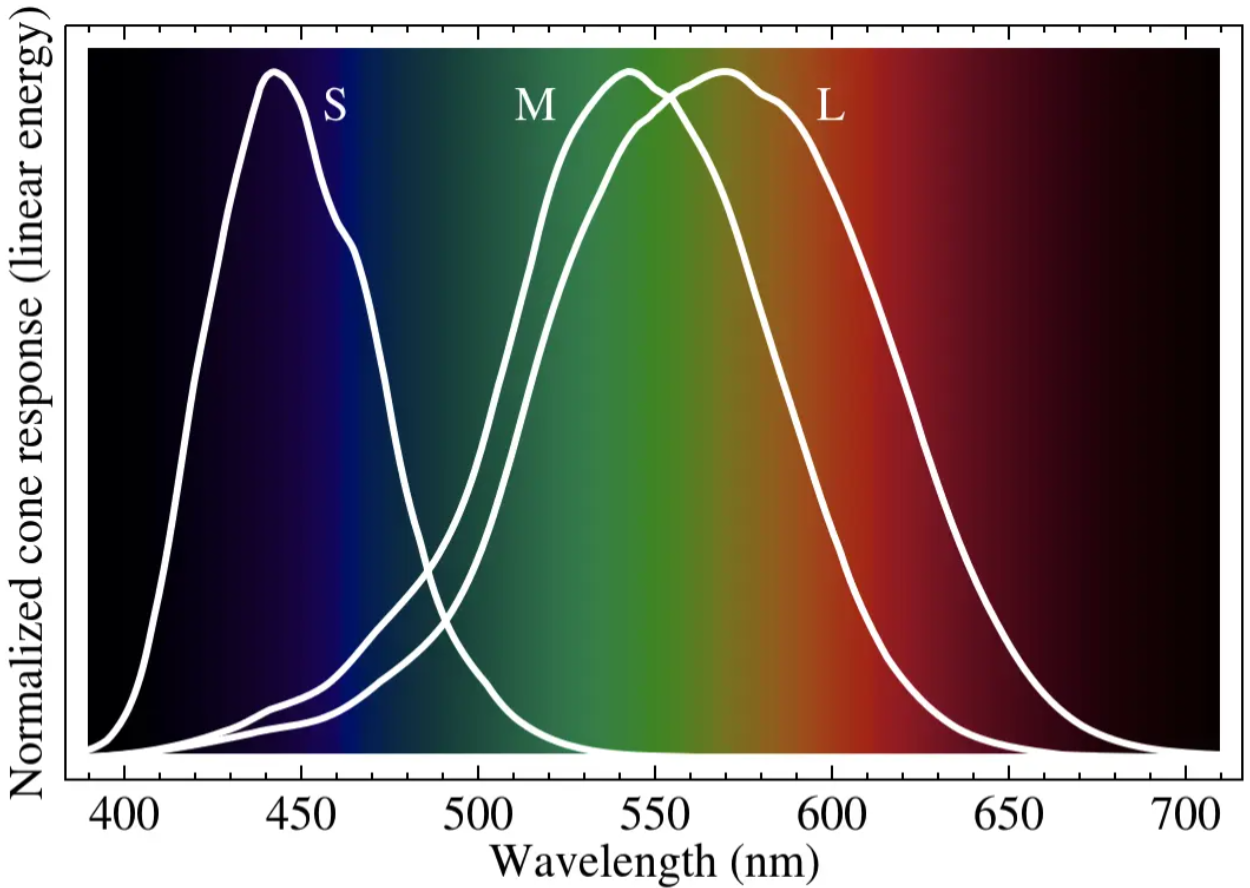
人类眼睛中有三种对不同电磁波频率敏感的视锥细胞,分别是 Small Mediam Long,所有的颜色就是对这三种细胞不同强度刺激的组合结果,比如:
- 黄色就是同时刺激 M 细胞和 L 细胞的结果
- 同时刺激三种细胞时,我们就会得到白色
- 如果都没有刺激,那就是黑色
这三种基本的光就是我们通常意义上所说的三原色,通过这三种原色,基于同时用540nm 和 570 nm 波长的光刺激锥状细胞在人类大脑看来大约等价于用 560nm光刺激的原理我们可以模拟出任意颜色的效果。不过这种等价只基于人类成立,鸡只有两种视锥细胞,而皮皮虾则有足足十六对,人类眼中相同的颜色在其他生物眼中可能差异非常大,不过这并不重要,只要能骗过我们的大脑就行,这种原理就是我们现代彩色显示器的理论基础。
RGB 是我们接触最多的颜色空间,由三个通道表示一幅图像,分别为红色(R),绿色(G)和蓝色(B)。这三种颜色的不同组合可以形成几乎所有的其他颜色。RGB 颜色空间是图像处理中最基本、最常用、面向硬件的颜色空间,比较容易理解。利用三个颜色分量的线性组合来表示颜色,任何颜色都与这三个分量有关,而且这三个分量是高度相关的。
RGB 颜色的十六进制由六位十六进制数字组成的,形式如 #RRGGBB,其中 RR、GG、BB 分别是两位十六进制数字,分别表示红、绿、蓝三原色通道的色阶。比如我们使用的截图工具snipaste,可以在截图的时候显示显示器上任意一点的RGB的颜色,默认博客的背景就是255,显示未(255,255,255)对应RGB三色。
色阶可以表示某个通道的强弱。
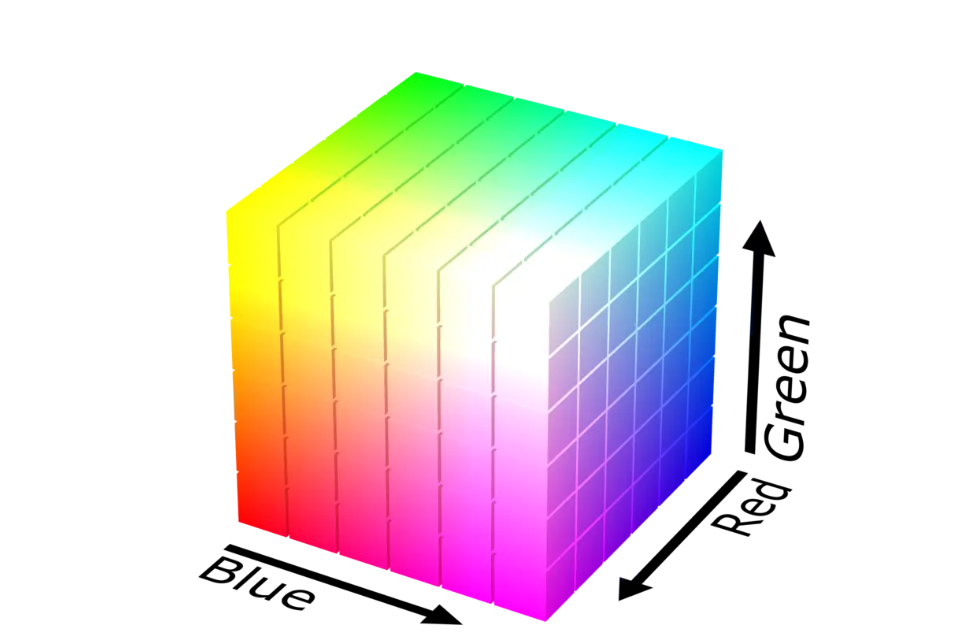
两位十六进制数字可以表示 256 个数字(0 ~ 255),也就是 256 个色阶。所以理论上一共能表示 2 的 24次方,也就是一共 16777216 种不同的颜色。
我们可以用一个三维立方体,把 RGB 能表示的所有颜色形象地描述出来。效果如下图:
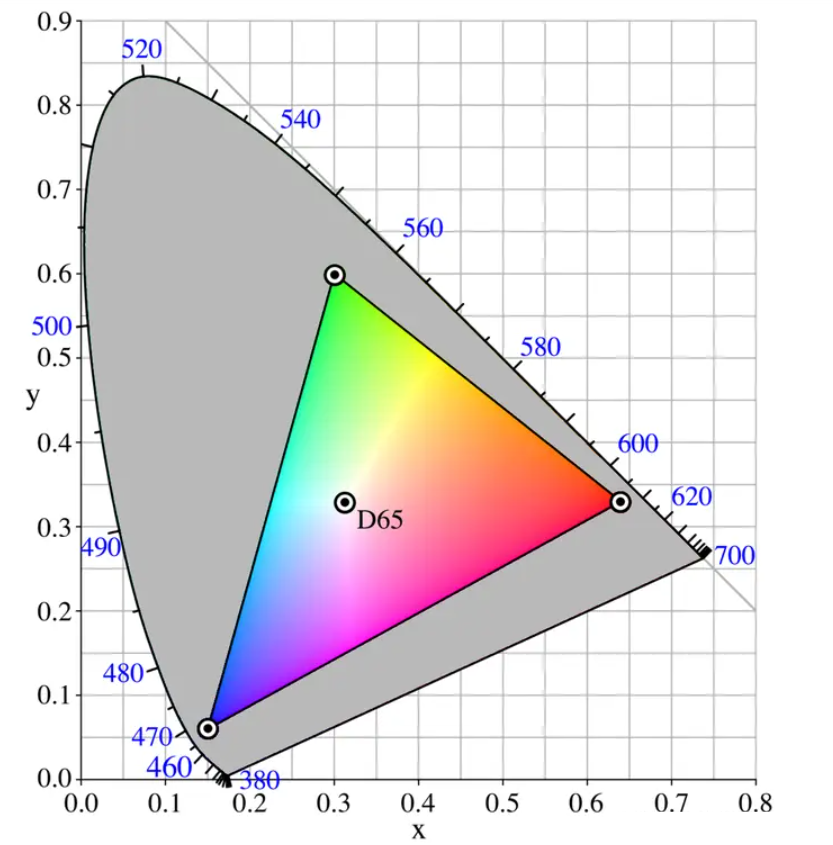
不过 RGB 并不能表示人眼所能看见的所有颜色,如下图所示
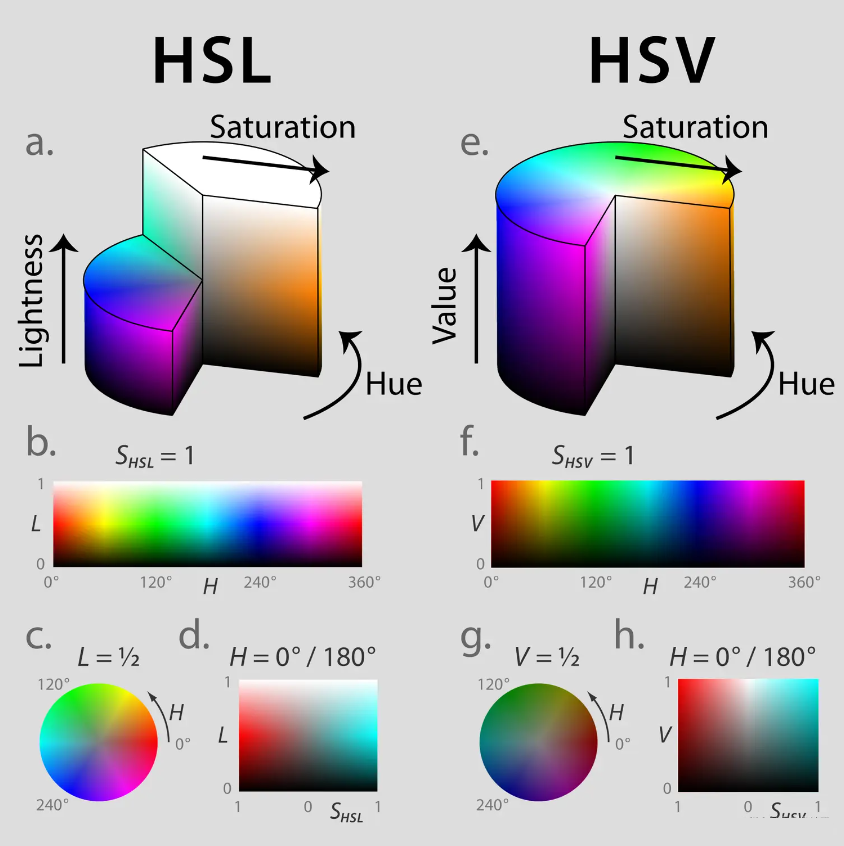
0.4HSV/HSL格式
自然环境下获取的图像容易受自然光照、遮挡和阴影等情况的影响,即对亮度比较敏感。而 RGB 颜色空间的三个分量都与亮度密切相关,即只要亮度改变,三个分量都会随之相应地改变,而没有一种更直观的方式来表达。
0.4.1HSV颜色空间
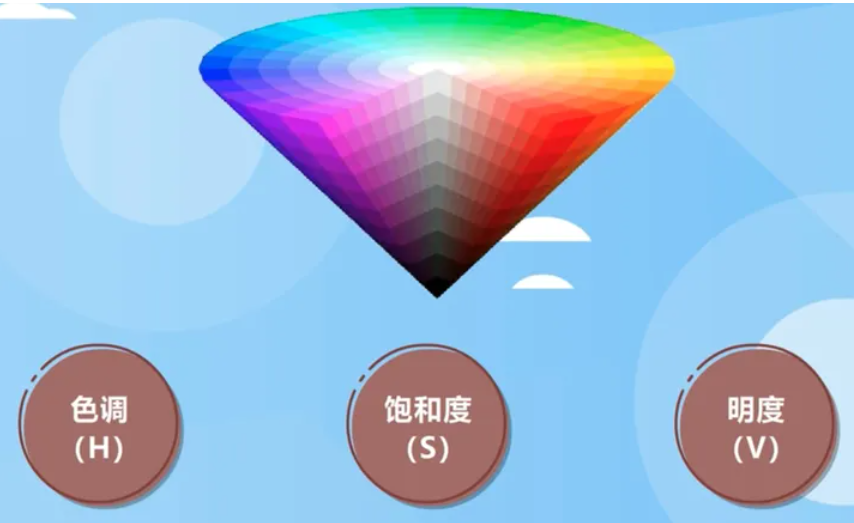
在图像处理中使用较多的是 HSV 颜色空间,它比 RGB 更接近人们对彩色的感知经验。非常直观地表达颜色的色调、鲜艳程度和明暗程度,方便进行颜色的对比。
在 HSV 颜色空间下,比RGB 更容易跟踪某种颜色的物体,常用于分割指定颜色的物体。
HSV 表达彩色图像的方式由三个部分组成:
-
Hue(色调、色相):直接决定了什么颜色,RGB是通过三个值决定颜色,而HSV只通过H值就可以决定;
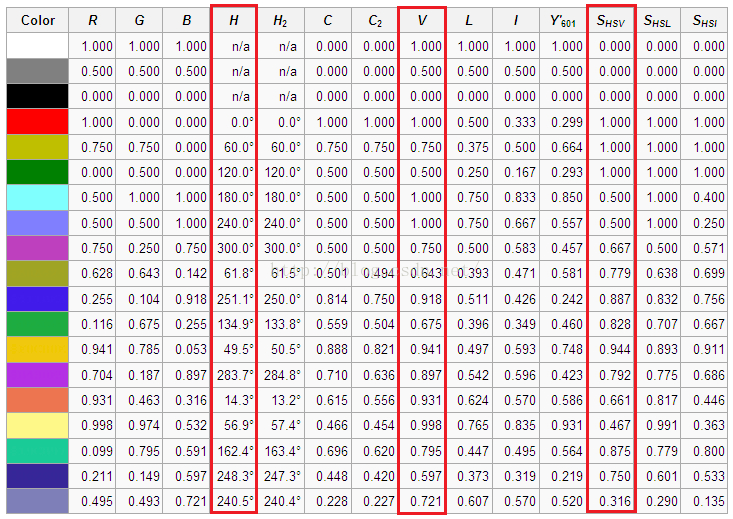
用角度度量,取值范围为0°~360°,从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°,。它们的补色是:黄色为60°,青色为180°,品红为300°,0°- 359°时颜色会依次变换当角度到达360°时也就是红色,角度也就又回到0°了,所以总共为360°,每变换1°时,色相就会有轻微的变化!如果是顺时针的话这个变换过程会从红色逐渐变换到绿色,在由绿色逐渐变换到蓝色,在由蓝色逐渐变换到红色!逆时针的话就是相反的!
-
Saturation(饱和度、色彩纯净度):决定了颜色的纯度,饱和度越高,颜色越鲜艳;
饱和度S表示颜色接近光谱色的程度。一种颜色,可以看成是某种光谱色与白色混合的结果。其中光谱色所占的比例愈大,颜色接近光谱色的程度就愈高,颜色的饱和度也就愈高。饱和度高,颜色则深而艳。光谱色的白光成分为0,饱和度达到最高。通常取值范围为0%~100%,值越大,颜色越饱和。
-
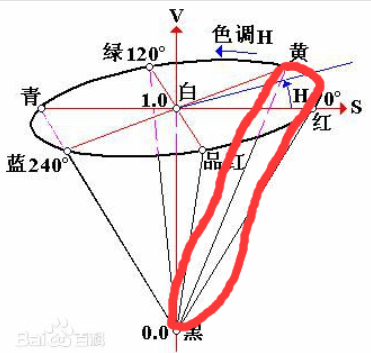
Value(明度):决定了颜色的亮度,亮度越高,颜色越亮;
明度表示颜色明亮的程度,对于光源色,明度值与发光体的光亮度有关;通常取值范围为0%(黑)到100%(白)。
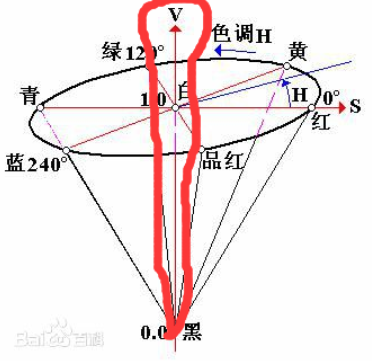
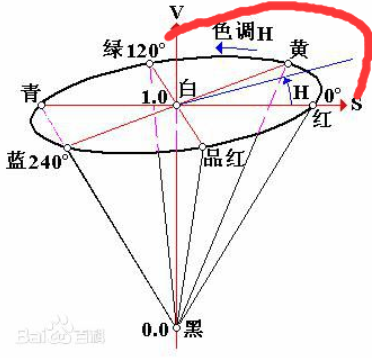
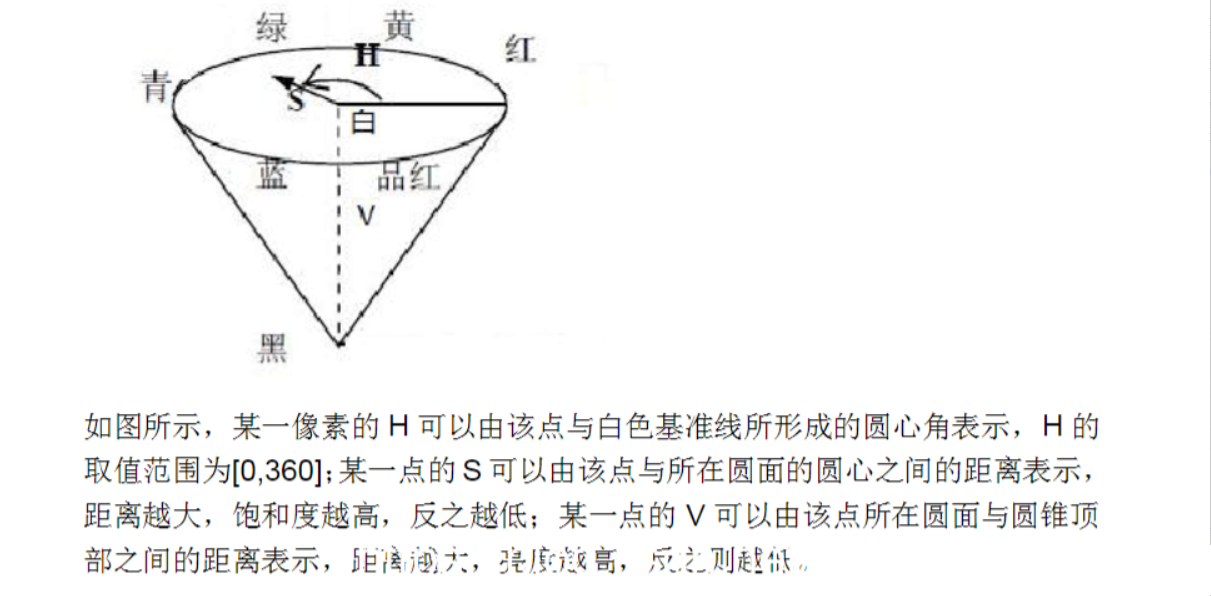
用下面这个圆柱体来表示 HSV 颜色空间,圆柱体的横截面可以看做是一个极坐标系 ,H 用极坐标的极角表示,S 用极坐标的极轴长度表示,V 用圆柱中轴的高度表示。
HSV数学模型
H参数表示色彩信息,即所处的光谱颜色的位置。该参数用一角度量来表示,红、绿、蓝分别相隔120度。HSV中每一种颜色的互补色分别相差180度。意思就是说:两种颜色在互补时最大为180°
例如:
在HSV模型中红与绿的互补色为黄色,其角度为60°
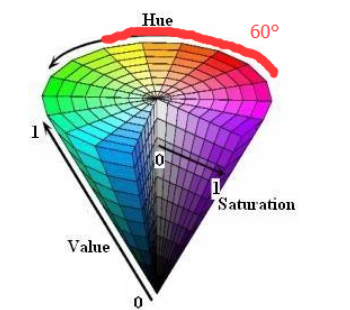
绿色与蓝色的互补光为青色其角度也为60°
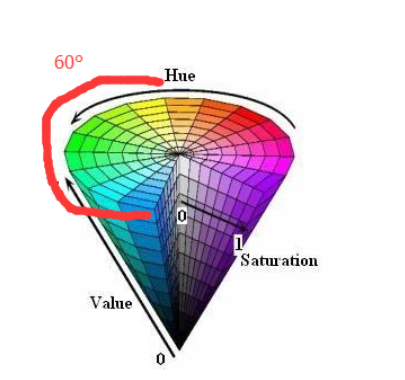
蓝色与红色的互补光为品红色其角度也为60°
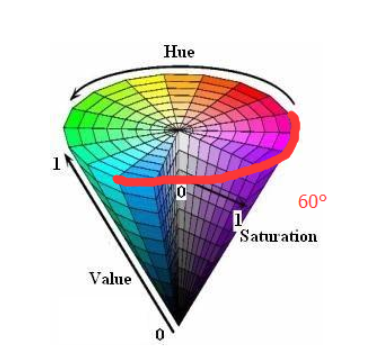
那么按逆反的方向来算,绿色到红色的互补光为60°
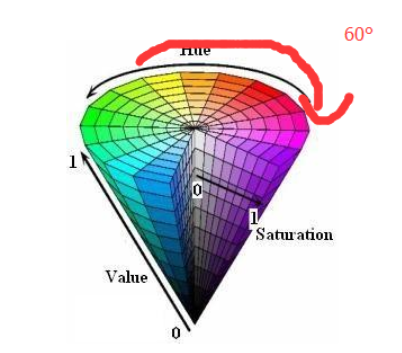
蓝色到绿色的互补光也为60°
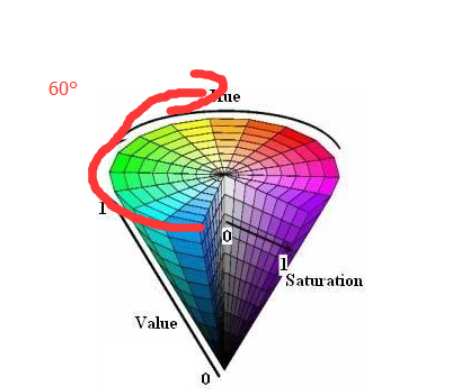
红色到蓝色的互补光也为60°
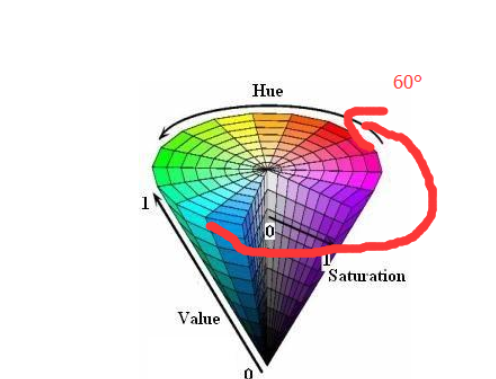
所以通过以上知识可以知道,红色到到绿色之间的互补光为60°,而绿色到红色之间的互补光也为60°所以每一种颜色的色差是:60°+ 60°= 120°
互补光的色差在HSV颜色模型中是这样来算的!
纯度S为一比例值,范围从0到1,它表示成所选颜色的纯度和该颜色最大的纯度之间的比率。S=0时,只有灰度。
V表示色彩的明亮程度,范围从0到1。有一点要注意:它和光强度之间并没有直接的联系。
HSV对用户来说是一种直观的颜色模型。我们可以从一种纯色彩开始,即指定色彩角H,并让V=S=1,然后我们可以通过向其中加入黑色和白色来得到我们需要的颜色。增加黑色可以减小V而S不变,同样增加白色可以减小S而V不变。例如,要得到深蓝色,V=0.4 S=1 H=240度。要得到浅蓝色,V=1 S=0.4 H=240度。
一般说来,人眼最大能区分128种不同的色彩,130种色饱和度,23种明暗度。如果我们用16Bit表示HSV的话,可以用7位存放H,4位存放S,5位存放V,即745或者655就可以满足我们的需要了。
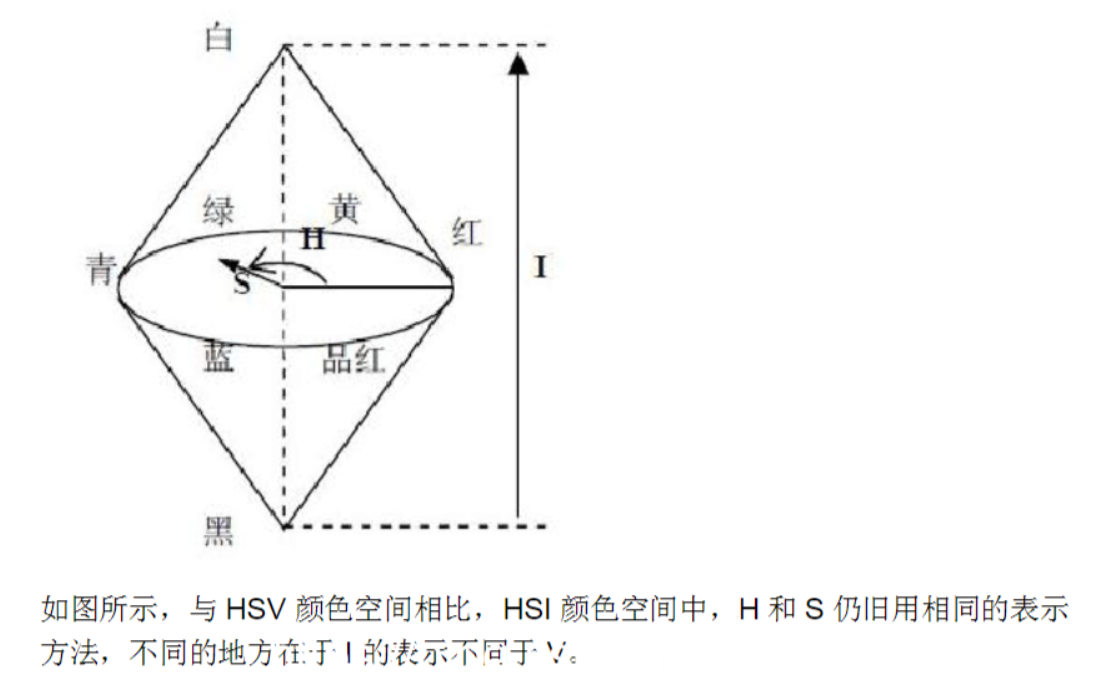
0.4.2HSL颜色空间
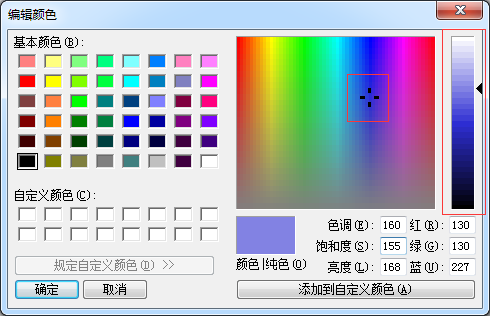
HSL〔Hue-SaturationIntensity(Lightness),HSI或HSL〕颜色模型用H、S、L三参数描述颜色特性,其中H定义颜色的频率,称为色调;S表示颜色的深浅程度,称为饱和度;L表示强度或亮度。
-
色调(色相)
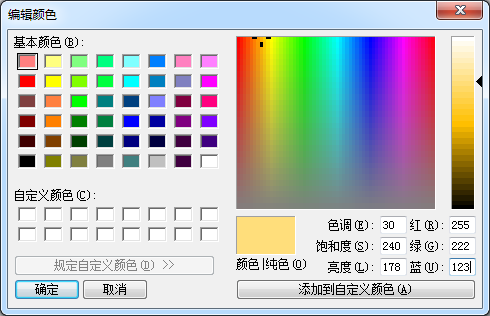
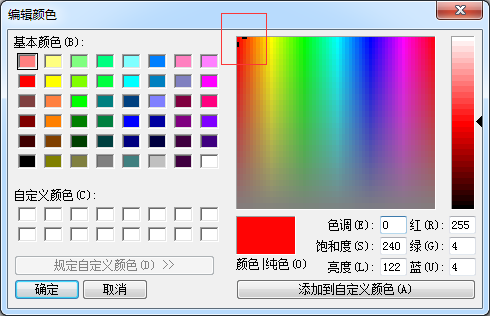
我们修改一下色调,当把色调调低时,颜色更加偏向于红色
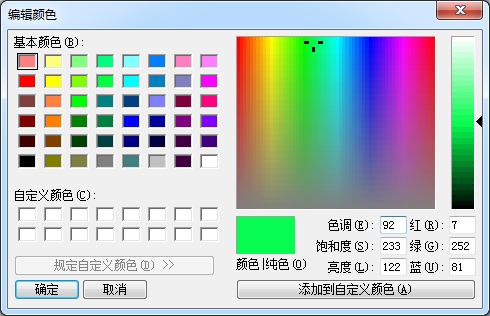
当我们把色调调高一点时,颜色更加偏向于绿色
当颜色在调高一点时,颜色更加偏向于蓝色
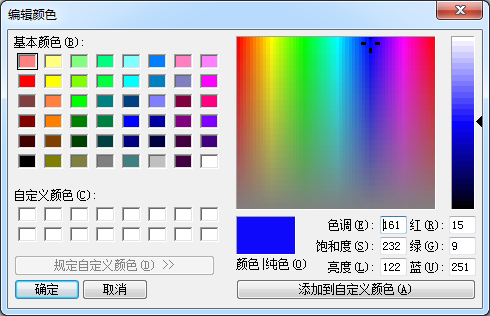
所以由此可以得出色调是决定一个像素点中的颜色更偏向于哪一方(RGB)
-
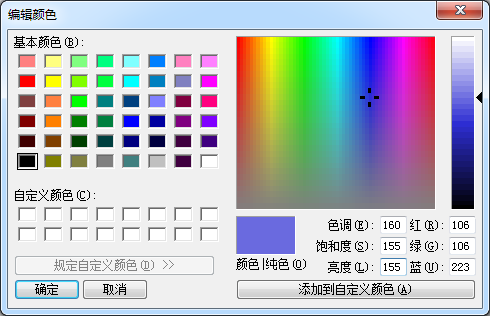
饱和度
饱和度决定了颜色空间中颜色分量,饱和度越高,说明颜色越深,饱和度越低,说明颜色越浅!
当饱和度为55时,可以发现该颜色空间能显示的颜色分量非常低

当我把饱和度调高一点时,可以发现颜色分量显示的明显要深!
可以与上图形成鲜明的对比。
所以饱和度在颜色空间中是起到一个控制RGB组合色的颜色深度的作用。
-
亮度
亮度决定颜色空间中颜色的明暗程度!
如图,亮度设置比较高的时候会发现颜色显示的较为鲜艳
当我们把亮度调低一点时
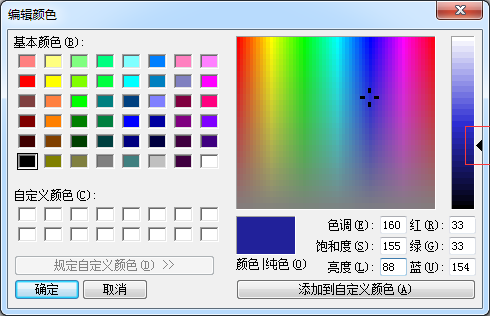
会发现颜色会变得非常暗!
所以亮度在颜色空间中起到一个控制RGB组合色的明暗程度的作用。
彩色图片中,色调决定彩色图片更加偏于哪一方!
当人观察一个彩色物体时,用色调、饱和度、亮度来描述物体的颜色。色调是描述纯色的属性(纯黄色、橘黄或者红色);饱和度给出一种纯色被白光稀释的程度的度量;亮度是一个主观的描述,实际上,它是不可以测量的,体现了无色的强度概念,并且是描述彩色感觉的关键参数。
而强度(灰度)是单色图像最有用的描述,这个量是可以测量且很容易解释。则将提出的这个模型称作为HSL(色调、饱和度、强度)彩色模型,该模型可在彩色图像中从携带的彩色信息(色调和饱和度)里消去强度分量的影响,使得HSL模型成为开发基于彩色描述的图像处理方法的良好工具,而这种彩色描述对人来说是自然而直观的。
数学模型
- 明度为0的时候,只有一个点,只能是黑色。没有光,啥都看不见。后面我们要让明度是某个不为零的值,才好谈下去。基于这个条件,
- 纯度为0的时候,只有一条线,只能是黑白的。没有对比度,就没有彩色。
- 纯度也不为0了,才可能出现彩色,至于到底是哪一种颜色,就要看色度了。
不知道大家有没有发现,无论你怎么修改色调,饱和度,亮度,RGB三色值会跟随而变化,其实色调,饱和度,亮度都是通过特定的算法经过计算修改RGB三色而达到的控制颜色效果!
两者比较
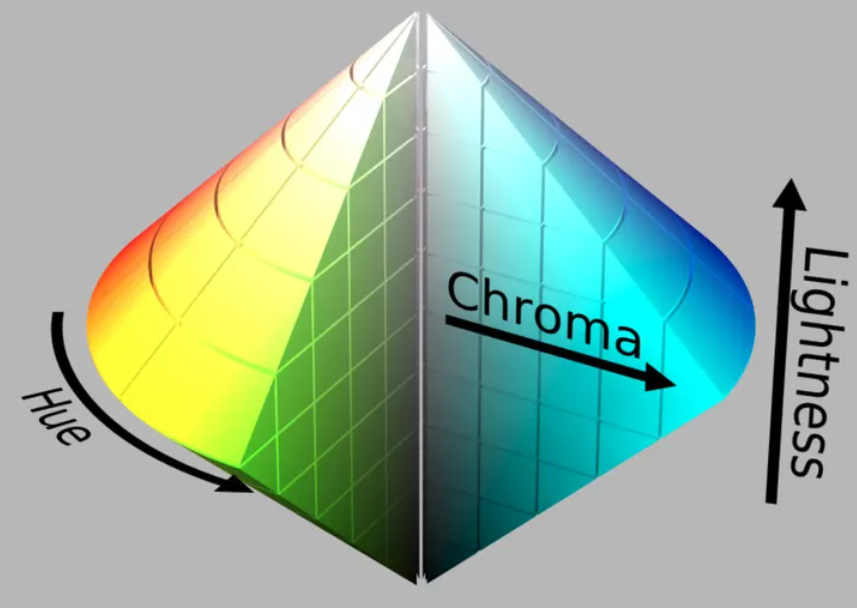
0.4.3HSL 和 HSV 的局限性
- 色相相差相同的情况下,各个颜色直接的颜色变化并不是均匀的;
- 不同色相相同亮度的颜色看起来亮度却不一样,这是由于人眼对不同频率的光的敏感度不同造成的。
因此,HSL 依然不是最完美的颜色方法,我们还需要建立一套针对人类知觉的标准,这个标准在描述颜色的时候要尽可能地满足以下 2 个原则:
- 人眼看到的色差 = 颜色向量间的欧氏距离
- 相同的亮度,能让人感觉亮度相同
于是,一个针对人类感觉的颜色描述方式就产生了,它就是比较新的颜色表示技术 CIE Lab。
CIE Lab
CIE Lab*(CIELAB)是惯常用来描述人眼可见的所有颜色的最完备的色彩模型,简称 Lab。它是为这个特殊目的而由国际照明委员会(Commission Internationale d’Eclairage 的首字母是 CIE)提出的。L、a 和 b 后面的星号(*)是全名的一部分,因为它们表示L*, a* 和 b*,不同于 L, a 和 b。因为红/绿和黄/蓝对立通道被计算为(假定的)锥状细胞响应的类似孟塞尔值的变换的差异,CIELAB 是 Adams 色彩值(Chromatic Value)空间。
L* 表示亮度, L* = 0 生成黑色而 L* = 100 指示白色,
a* 表示在红色/品红色和绿色之间的位置(a* 负值指示绿色而正值指示品红)
b* 表示在黄色和蓝色之间的位置(b* 负值指示蓝色而正值指示黄色)。
0.5 YUV格式
YUV是一种彩色编码系统,主要用在视频、图形处理流水线中(pipeline)。相对于 RGB 颜色空间,设计 YUV的目的就是为了编码、传输的方便,减少带宽占用和信息出错。

上面的图像为原始图像,可以拆分为RGB的三色图
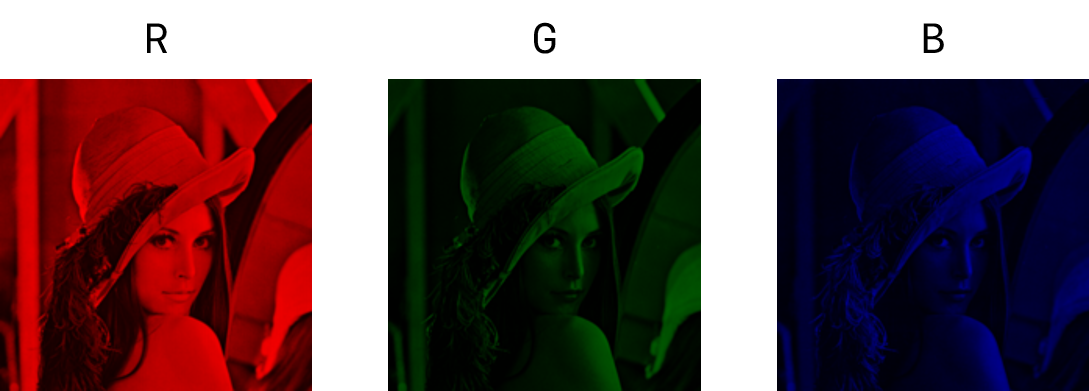
原始图像也可以用YUV表示

根据上面的图片,不难看出:
- Y分量对呈现出清晰的图像有着很大的贡献
- Cb、Cr分量的内容不太容易识别清楚
此外,你是否感觉:Y分量的内容看着有点眼熟?其实以前黑白电视的画面就是长这样子的。
YUV的发明处在彩色电视与黑白电视的过渡时期。
- YUV将亮度信息(Y)与色度信息(UV)分离,没有UV信息一样可以显示完整的图像,只不过是黑白的
- 这样的设计很好地解决了彩色电视与黑白电视的兼容性问题,使黑白电视也能够接收彩色电视信号,只不过它只显示了Y分量
- 彩色电视有Y、U、V分量,如果去掉UV分量,剩下的Y分量和黑白电视相同
0.6JPG、JPEG格式
二者没有本质的区别,Joint Photographic Experts Group即都是联合图像专家组,是用于连续色调静态图像压缩的一种标准,文件后缀名为.jpg或.jpeg,是最常用的图像文件格式。
通俗的说就是我们保存一张照片的格式,这种格式里面有一些特点:用有损压缩方式去除冗余的图像数据,用较少的磁盘空间得到较好的图像品质。而且JPEG是一种很灵活的格式,具有调节图像质量的功能,它允许用不同的压缩比例对文件进行压缩等等。
1bayer矩阵
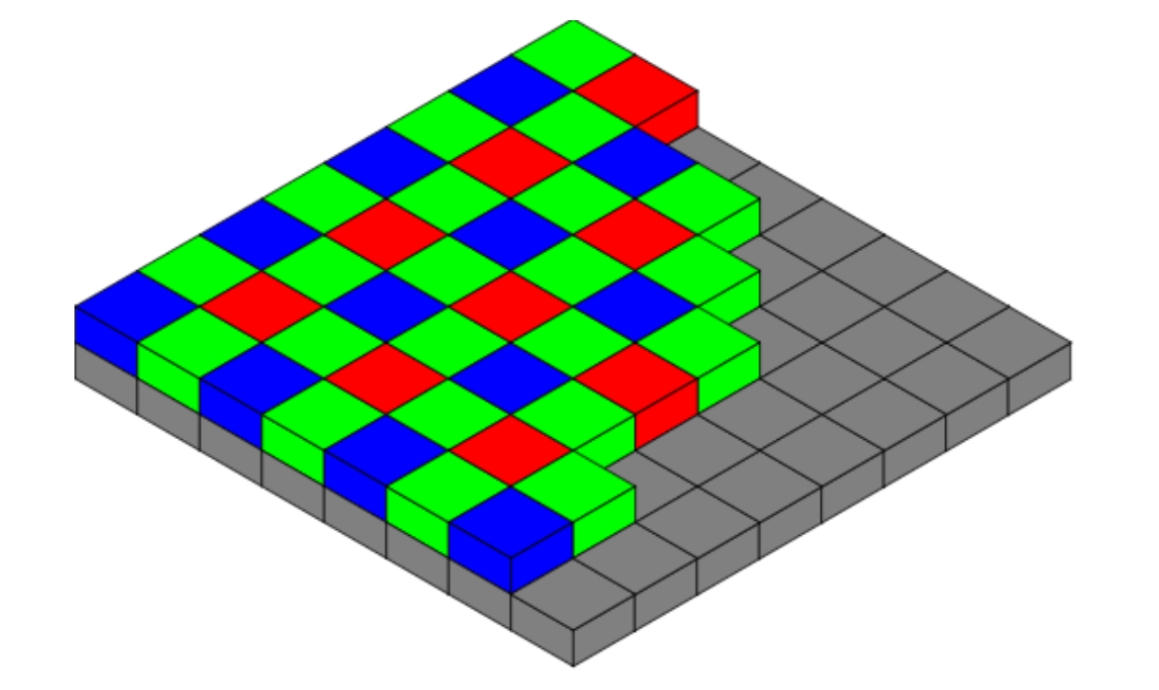
这就是图像传感器上面的感光单元,为一个个红绿蓝的滤光片阵列按照某种规则排布的,这种格式的一般规律是:
奇数扫描行输出 RGRG……
偶数扫描行输出 GBGB……
这种格式也就是所说的专业名词:Bayer格式
很多人会说,一个像素不是由三基色组成吗?为什么这一个像素只有一种颜色呢?那不是不合理吗?
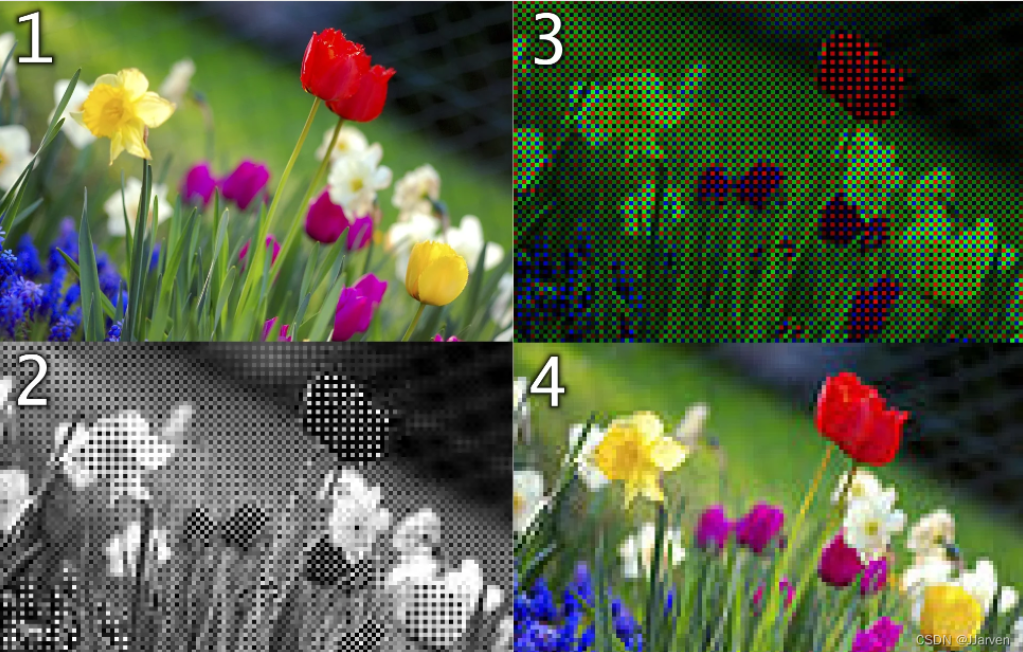
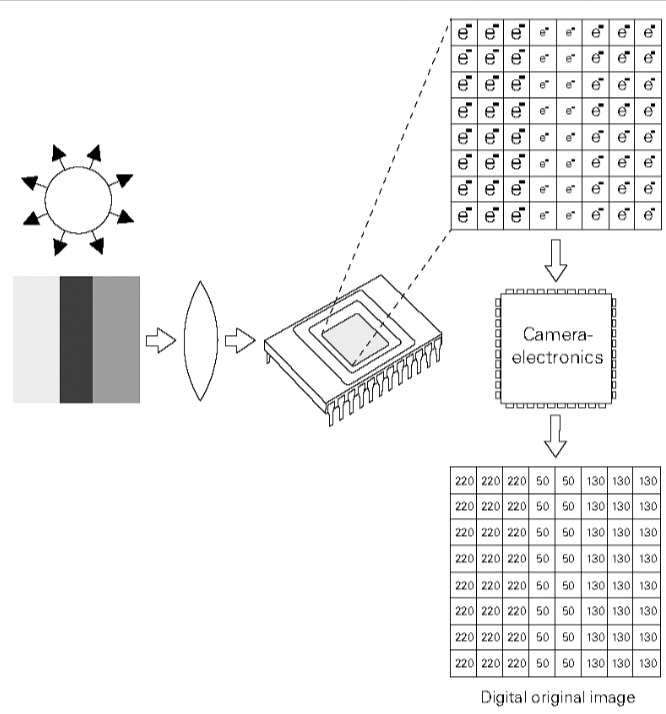
1.人眼观察到的图像 2.RAW原始图像 3.Bayer格式输出图像 4.运用插值计算后输出图像
对于图1来说,对1人眼观察到的图像(也可以说是保存在存储设备当中的.JPEG格式的图片)进行放大,我们能观察到其中的每个像素点,也就是RGB颜色空间
对于图2来说,然后使用相机对着这个景色拍照,得到的RAW数据就是2所示,也就是非常原始的图像信息,其中只有亮度分量,而没有色度、色调、饱和度等其他分量(这里就是没有Y、U分量,只有V的意思吧?应该可以这么理解吧?引出YUV颜色空间知识点),这个图像相对应就是之前所说的老式机械照相机的黑白底片。
对于图3来说,经过Bayer阵列的采集之后就得到了图3所示相机传感器获取到的原始图像信息,粗略看好像是和人眼看到的大致相同,但是放大之后观察
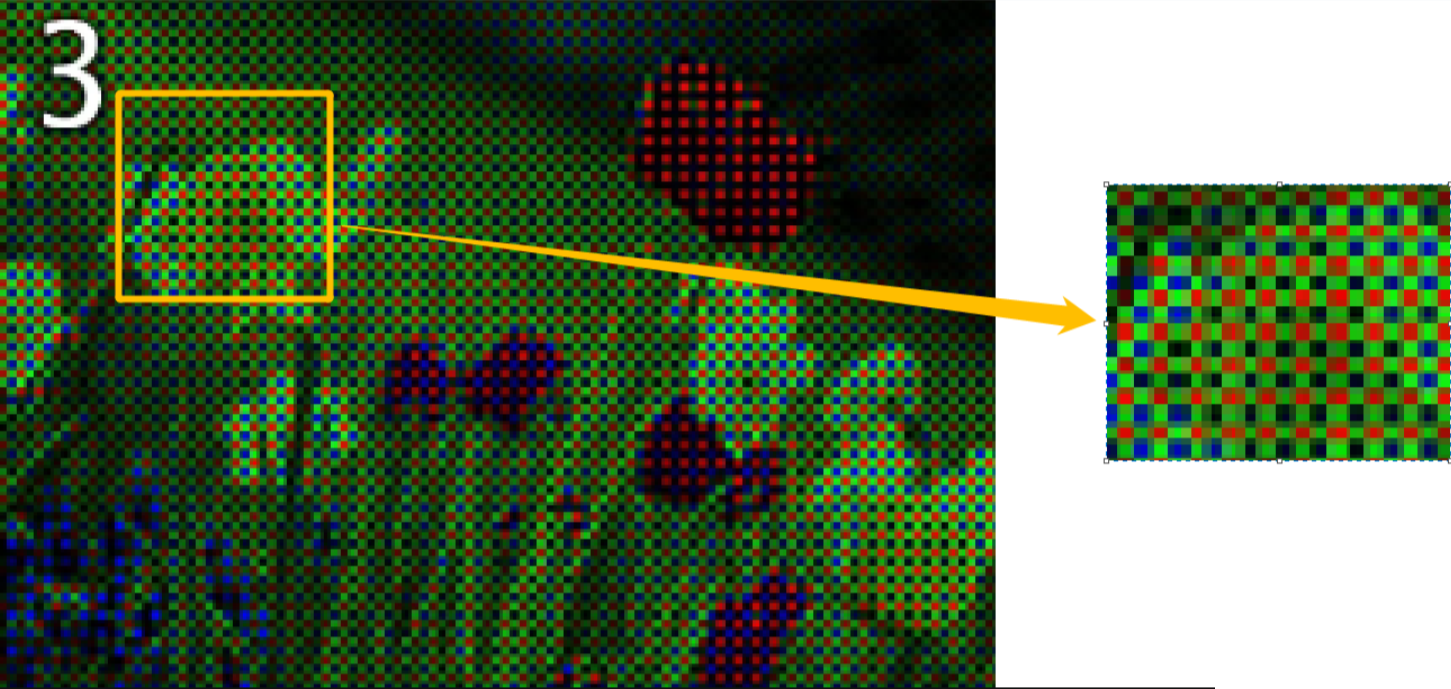
放大后效果其实是和上述所说的Bayer格式一样的,奇数扫描行输出 RGRG……,偶数扫描行输出 GBGB……,每一个像素点只有RGB通道当中的一个分量,也就是说有2/3的颜色分量是没有的。
对于图4来说,计算机进行后期处理的第一步就是猜色,也叫去马赛克。 如果一个像素只可能有三种颜色,那么怎么能拍出彩色照片呢?前面说了,每个滤光点周围有“规律”地分布其他颜色的滤光点,那么就有可能结合它们的值,判断出光线本来的颜色。
2bayer插值
2.1bayer格式图像传感器硬件
图像传感器的结构如下所示,每一个感光像素之间都有金属隔离层,光纤通过显微镜头,在色彩滤波器过滤之后,投射到相应的漏洞式硅的感光元件上。
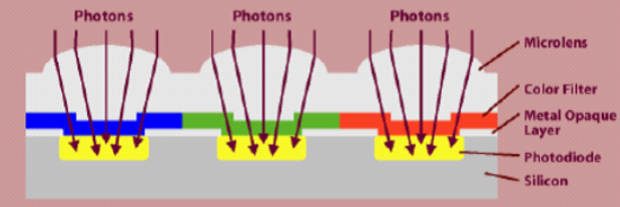
当Image Sensor往外逐行输出数据时,像素的序列为GRGRGR…/BGBGBG…(顺序RGB)。这样阵列的Sensor设计,使得RGB传感器减少到了全色传感器的1/3,如下所示。
1(1/2+1/4+1/4)/(1+1+1)=1/3
2.2bayer格式插值红蓝算法实现
这里只介绍算法,具体算法怎么实现需要自己查阅资料了
每一个像素仅仅包括了光谱的一部分,必须通过插值来实现每个像素的RGB值。为了从Bayer格式得到每个像素的RGB格式,我们需要通过插值填补缺失的2个色彩。插值的方法有很多(包括领域、线性、3*3等),速度与质量权衡,最好的线性插值补偿算法。其中算法如下:
R和B通过线性领域插值,但这有四种不同的分布,如下图所示:
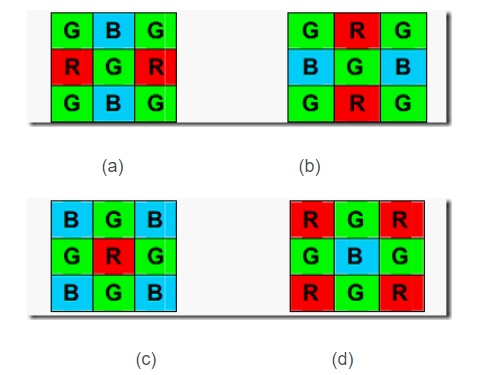
在(a)与(b)中,R和B分别取邻域的平均值。
在(c)与(d)中,取领域的4个B或R的均值作为中间像素的B值。
关于为什么叫拜耳矩阵
2012年末,一位对世界,特别是对蜂鸟网所有网友的生活,产生巨大影响的老人,进入了天堂,他的名字叫布莱斯·拜尔(Bryce Bayer)。
拜尔在天堂遇见了上帝。
上帝:拜尔,你这个骗子!看看你在下面做的好事,现在还有脸来见我?
拜尔:我的主啊,我是您忠实的信徒,我怎么会是骗子呢? 上帝:你在下面发明了个什么“拜尔阵列”,这玩意儿几乎垄断了人类的数码相机行业,这是你干的吗?!
拜尔:是啊,我的主。我发明了这种传感器,让数码摄影技术在人类中得到了普及,这难道不是干了个大好事吗?
上帝:普及数码摄影技术当然是好事,但关键是,你的传感器偷工减料啊!我在创世纪的时候,说要有光,于是就有了光,我创造的光里面包含了红、绿、蓝三种基本色。
但是你的传感器里面根本就没有完整记录我这三种颜色,你每个像素只记下了一种颜色的亮度值,然后通过后期处理(=PS?)软件,胡乱猜出像素里另两个基本色,再弄出图像来糊弄人,一张照片里只有1/3的色彩是真实的,这还不算骗子啊你!
拜尔:我的主啊,您看我一脸老实相,会是骗子吗!我的传感器这么干,是有苦衷的啊!您得听我慢慢道来。
上帝:好,那你说吧。要是说得有道理,能说服我,特别是能说服蜂鸟网上的网友,那才能让你进入名人堂。否则的话,你还得回到人间去,自己去收拾你的烂摊子。
拜尔手臂一挥,上帝面前出现了一个大屏幕,结合着屏幕上的图文,拜尔开上给上帝解释起来。
拜尔:那是上个世纪的70年代,我在柯达公司从事科研工作,其中一个重要课题,就是怎么样才能将影像转换成数字信号储存下来。我们都是凡人啊,凡人没有您那样无边法力,所以我们的光电传感器只能够记录光的强度,而无法分辨光的颜色,即使是现在21世纪了,依然是这样。
但是凡人也是贪心的,我们不满足于只能拍黑白数码照片,只能在有限的条件下想尽办法,去尽可能的获得色彩。我绞尽了脑汁,要想办法解决颜色的记录问题,直到有一天我的小狗菲儿帮我解决了这个问题。
上帝:你的狗?
拜尔:是的,我的小狗狗菲儿。这天它嘴里咬着一件东西,跑到我面前,是一个黄色滤镜。就是我以前拍黑白照片时常用的那种滤镜,黄色的滤镜可以滤除或减小红、蓝光对照片的影响。
看到这个滤镜,我脑中顿时灵光一闪,如果我在每个像素上分别装上这三种滤镜,不就能得到三种光的亮度了吗,然后一合成,色彩就重现了!上帝啊,难道不是您指示我的小狗来帮助我的吗?
上帝:咳咳,嗯,这倒是我干的……
拜尔:但是,我们凡人做不到。我们的元器件制造水平达不到这个要求。我们无法轻易地在一个像素里造进去三个滤镜和感光元件。即使勉强能做到,这个成本也不是绝大多数人能够承受的。无法商业化的东西,对于我们商业化的公司而言,没有现实价值。
在随后的日子里,我又尝试了各种方法,最后,发明了一种基于单个颜色微小滤镜的影像传感器系统,就是现在被人们称为“拜尔阵列”的传感器系统。
这只用一块图像传感器,就解决了颜色的识别。做法是在图像传感器前面,设置一个滤光层(Color filter array),上面布满了一个个滤光点,与下层的像素一一对应。
每个滤光点只能通过红、绿、蓝之中的一种颜色,这意味着在它下层的像素点只可能有三种颜色:红、绿、蓝,或者什么也没有(黑)。
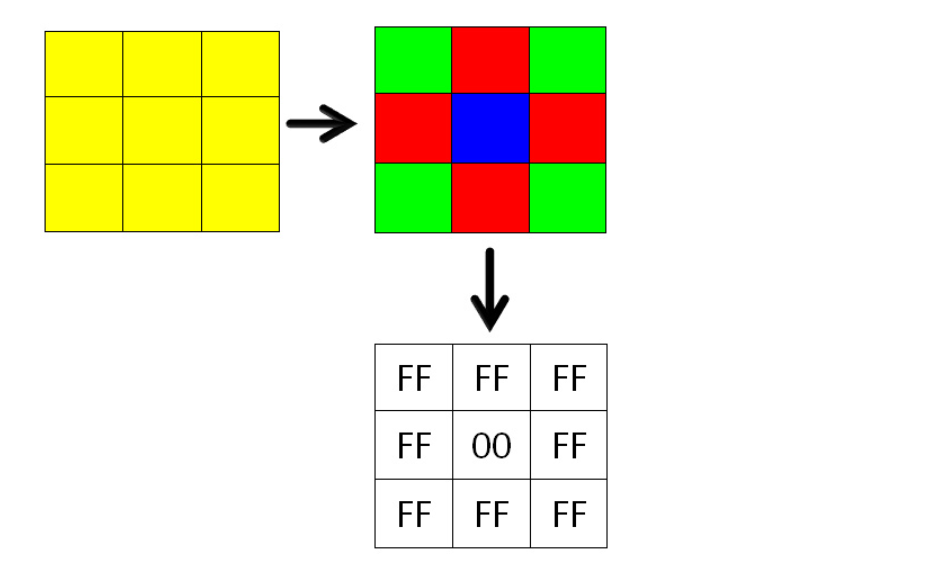
不同颜色的滤光点的排列是有规律的:每个绿点的四周,分布着2个红点、2个蓝点、4个绿点。这意味着,整体上,绿点的数量是其他两种颜色点的两倍。这是因为研究显示人眼对绿色最敏感,所以滤光层的绿点最多。
以黄光为例,它由红光和绿光混合而成,那么通过滤光层以后,红点和绿点下面的像素都会有值,但是蓝点下面的像素没有值,因此看一个像素周围的颜色分布—-有红色和绿色,但是没有蓝色—-就可以推测出来这个像素点的本来颜色应该是黄色。
在得到每个像素的RGB颜色后,后期软件还要加入白平衡矫正、gamma校正,并应用风格曲线、降噪锐化设置等参数,这些参数多数可以人为去设定,这个参数设定的过程,就是俗称的ps,准确地讲就是人工地后期处理。
处理完后最后生成一幅位图,可以用TIFF、JPG等位图格式保存在磁盘上。
上帝:不对,不对!你说是要完成后期处理后才能看到图像,但是多数相机都有实时取景模式,我都没拍呢,哪来的后期!还有我看到我们天国摄协里也在玩LR什么的,这不是在做后期调整前就看到图了?还是看着图一点一点地调呢!这你怎么解释?
拜尔:我的主啊,人类是很狡猾的!实时取景和LR等软件里给先你看到的图像,都是先用它内部默认的后期参数进行粗略后处理,先糊弄一下人眼,满足一下心理。当你全部后期参数设置完后,这不还有一个“导出”的过程吗?这才是真正在进行完整全面的图像后处理呢!
上帝:我的上帝啊!哦,也就是我的我啊!弄出个照片还有这么多花花肠子!
拜尔:在您还未赐予我们人类全色彩的感光器件前,我也是没办法才想出这么个主意,通过计算去猜测颜色的啊!
上帝:那后来不是有个适马公司搞出个叫FOVEON X3的全色彩图像传感器吗?有了这个怎么还在用你的老拜尔?
拜尔:我的主啊,FOVEON X3的全色彩传感器是好,但是一来有专利权的限制,难以推广,二来也是由于技术水平限制,这个FOVEON X3传感器在高感光度下的表现实在是不行,所以多数厂家还是在沿用我的老拜尔阵列。
哦,还有一家富士公司,改进了我拜尔阵列的颜色滤镜的排列方式,也取得了很好的效果。据说佳能公司也有了全色彩的传感器专利。不知道今后那天,我的老拜尔阵列也会和我一起进入天堂,存入天堂博物馆了。